Promise
ESP32
5g
API
hbase
无人机
MySQL集群搭建
BUCK
File的创建功能
ECDSA
基于范围的for循环
管理微信小程序登录态
SpringBoot配置文件
因数平方和
一维高斯函数
Java语言
标准容器
Sentieon
clickhouse
案例
ROS
2024/4/13 16:13:11
Eigen类型与ROS中tf相关消息类型进行相互转换工具
在ROS机器人编程资料书中,有个Eigen消息类型与TF相关消息类型进行互相转换的工具包感觉挺好使,修改一下方便以后使用。 1、头文件
#include <Eigen/Eigen>
#include <Eigen/Dense>
#include <Eigen/Geometry>
#include <Eigen/Ei…
ROS-6.参数的使用
参数的使用 参数服务结构命令行的使用方式运行小海龟命令介绍查看参数获取参数值设置参数保存参数到文件从文件导入参数 通过程序操作创建节点修改cmake编译运行 参数服务结构 ros中存在参数服务管理服务,管理这所有参数,所有节点剋订阅和发布这些节点
…
如何用Qt对ROS项目进行调试及创建GUI界面
一、前言
本文详细介绍了利用CMakeLists.txt文件把ROS项目导入到QtCreator进行代码编写和调试的过程,文末还介绍了ROS中使用Qt界面的方法
这种导入ROS项目到Qt的方法也适用于其他CMake创建的项目,这种方案缺点是导入项目后无法直接在Qt下面新建文件和…
使用vscode debug ros程序(A-LOAM)
目录写在前面源码vscode配置task配置launchdebug单个节点调试参考完写在前面
1、本文内容 使用vscode单步调试A-LOAM源码
2、平台 ubuntu1804, ros melodic, vscode, vscode ros插件 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/12565…
RANSAC(Random Sample Consensus)对点云进行多个平面的分割并可视化(附python代码)
使用 RANSAC(Random Sample Consensus)算法对点云进行多个平面的分割,并进行可视化。下面是对代码的逐行解释: pcd = o3d.io.read_point_cloud("xxx.pcd"):从文件中读取点云数据,并将其存储在变量 pcd 中。 segment = []:创建一个空列表,用于存储分割结果的点…
基于飞迪RTK/INS组合导航模组的里程计发布方法
文章目录 概要解算过程获取初始化点经纬度坐标系转UTM计算航向角发布odom坐标 完整代码 概要
这篇博客主要介绍,如何将GPS_fix、磁偏角转成odom信息。 PS:官方的驱动包中是自带odom信息,但是对于原点的定义尚未找到出处,故自己另外写了一套发…

ROS服务(Service)通信:通信模型、Hello World与拓展
服务通讯是基于请求响应模式的,是一种应答机制。
用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。
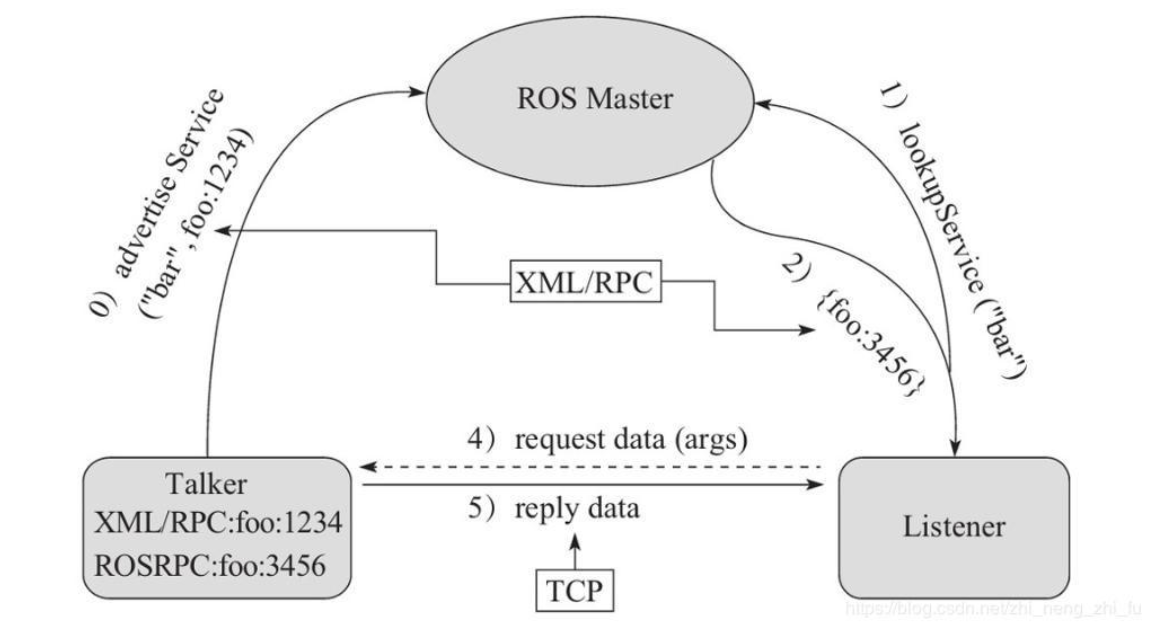
一、服务通讯模型
服务是一种双向通讯方式,它通过请求和应答的方式传递消息,该模型涉及到三个角色:
Master…
ROS 简单的跨浏览器通信
概述
ROS 和 RobotWebTools 在构建我们最新的分布式交互体验方面非常有用。 我们将继续基于其庞大的现有设备驱动程序目录,快速开发面向浏览器的 ROS 体验。 无论客户希望他们的交互使用触摸屏、操纵杆、灯光、声音,还是任何可以插入墙上的东西…
ROS:sudo rosdep init出错常规方法都无效后解决办法记录
参照网上进行ubuntu16.04系统下ROS平台安装时(例如Ubuntu16.04下的ROS安装),在初始化rosdep时报错,20-default.list无法下载:
sudo rosdep init
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/…
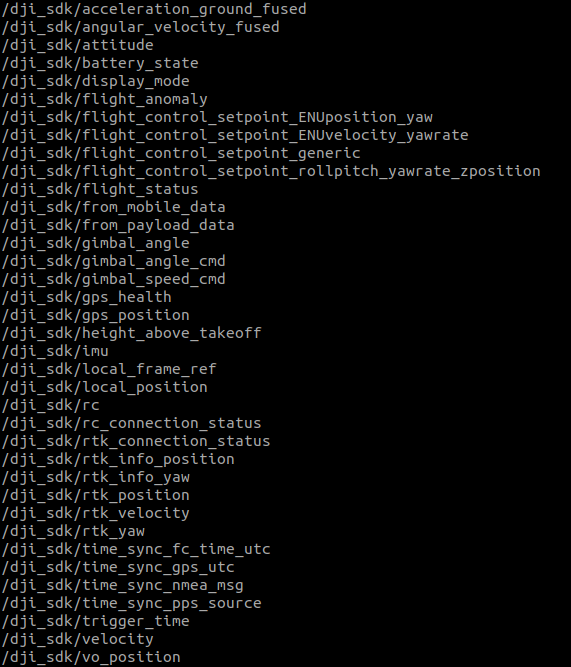
dji uav建图导航系列()ROS中创建dji_sdk节点包(一)项目结构
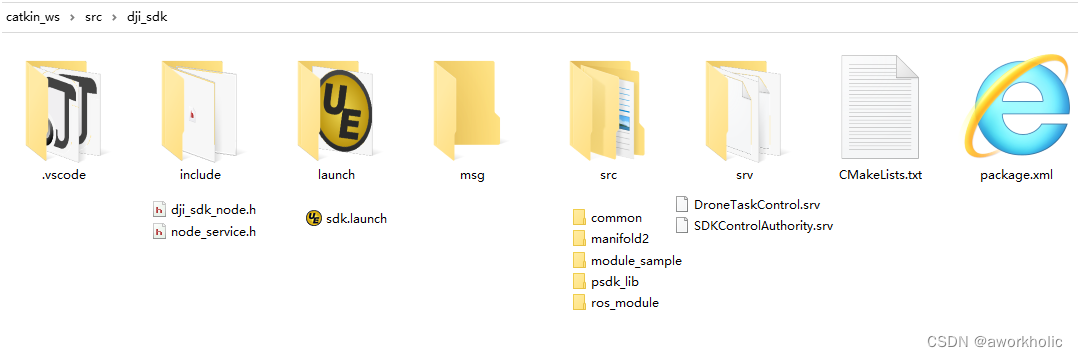
文章目录 1、整体项目结构1.1、 目录launch1.2、文件CMakeLists.txt1.3、文件package.xml1.4、目录include1.4、目录srv在ROS框架下创建一个无人机的节点dji_sdk,实现必需的订阅(控制指令)、发布(无人机里程计)、服务(无人机起飞降落、控制权得很)功能,就能实现一个类似…
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-kinetic-gazebo-dev/ros-kinetic
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/ros-kinetic-gazebo-dev/ros-kinetic-gazebo-dev_2.5.18-1xenial-20190124-142040-0800_amd64.deb 404 Not Found
参考:http://answers.ros.org/question/325039/apt-update-fails-cannot-inst…

Baize_h1mini六足机器人零件准备
导航在这里:
Baize_H1mini六足机器人制作教程(开源)_ros 六足机器人教程-CSDN博客
你现在在地图的红色字体位置(走到终点就制作完成了): 重要提示:自己使用打印机打印零件时,对于新…
Epuck2机器人——Pi-puck开发实践
Epuck2机器人是一款最新的科研教学实践使用的多功能移动机器人。由EPFL和GCtronic两个机构合作研发生产。 这款机器人的全貌如上图所示,主控芯片是STM32F4,具备蓝牙、WIFI等通信功能。 详情请参见官网:Epuck2科研教学机器人详细资料官网
由…

仿真机器人-深度学习CV和激光雷达感知(项目2)day03【机器人简介与ROS基础】
文章目录 前言机器人简介机器人应用与前景机器人形态机器人的构成 ROS基础ROS的作用和特点ROS的运行机制ROS常用命令 前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎…

ROS探索总结(十八)——重读tf
在之前的博客中,有讲解tf的相关内容,本篇博客重新整理了tf的介绍和学习内容,对tf的认识会更加系统。1 tf简介
1.1 什么是tftf是一个让用户随时间跟踪多个参考系的功能包,它使用一种树型数据结构,根据时间缓冲并维护多个…
ROS的模板库的创建(.so)与使用
1、创建模板库(so) 创建模板库.so 有利于代码的复用 1.1、 创建头文件与源文件 在ROS工作空间创建一个包文件creating_ros_library,在include/creating_ros_library 下创建头文件。在src中创建源文件 #ifndef EXAMPLE_ROS_CLASS_H
#define EXAMPLE_ROS_CLASS_H
#inc…

ROS与PCL中各种点云数据格式之间的转换(大总结)
ROS与PCL中各种点云数据格式之间的转换(大总结)
三种常用点云数据格式:
pcl::PointCloud< PointT>pcl::PCLPointCloud2snesor_msgs::PointCloud2
1.sensor_msgs::PointCloud2转pcl::PCLPointCloud2
pcl_conversion::toPCl(sensor_m…

MikrotikRouterOS简介--从零开始学RouterOS系列00
Mikrotik RouterOS简介
1. 什么是RouterOS?
RouterOS(下面简称ROS),是一款路由器操作系统,基于linux的。
2. 这款路由对我们常用的有什么区别?
A. 相比家用路由器,你需要更加专业的知识。 B…

Linux系统下如何在root下运行roslauch节点
目录
简介:
一、进入root账户
二、安装ros
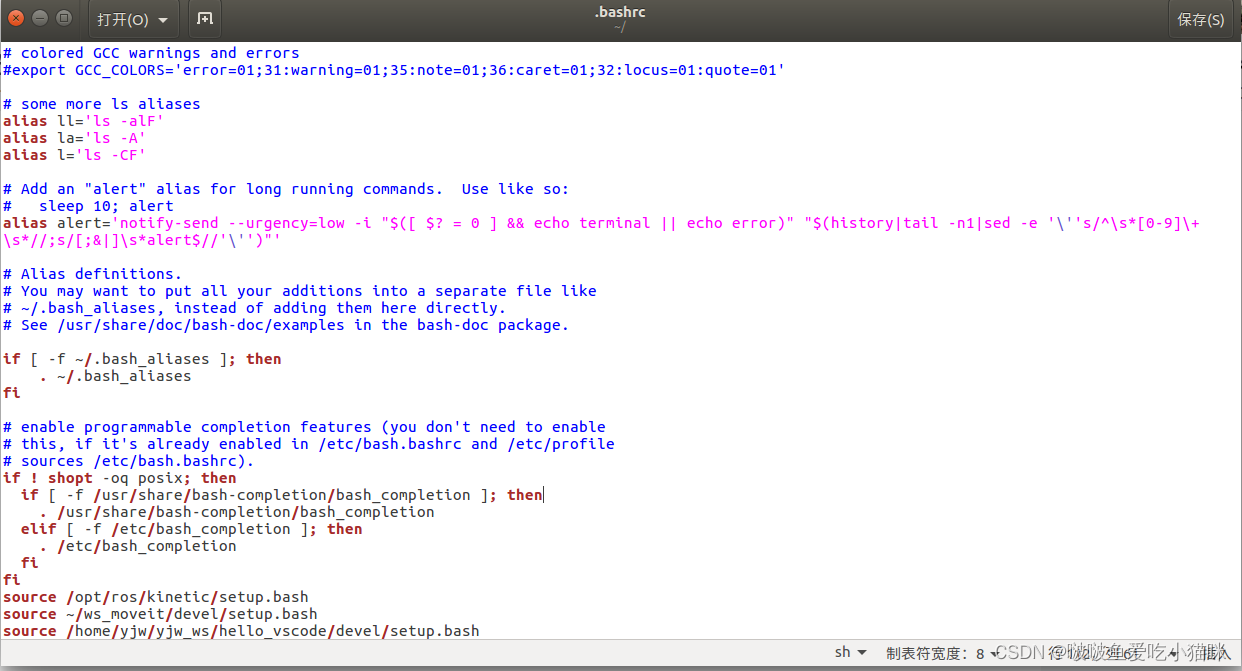
三、编写正确的.bashrc
四、安装驱动 五、在root下启动launch 简介: 在项目开发实际过程中,厂家提供的传感器设备驱动安装后,运行roslaunch 节点不能正常启动设备驱动,如…
Moveit中Motion Planning Pipeline的理解
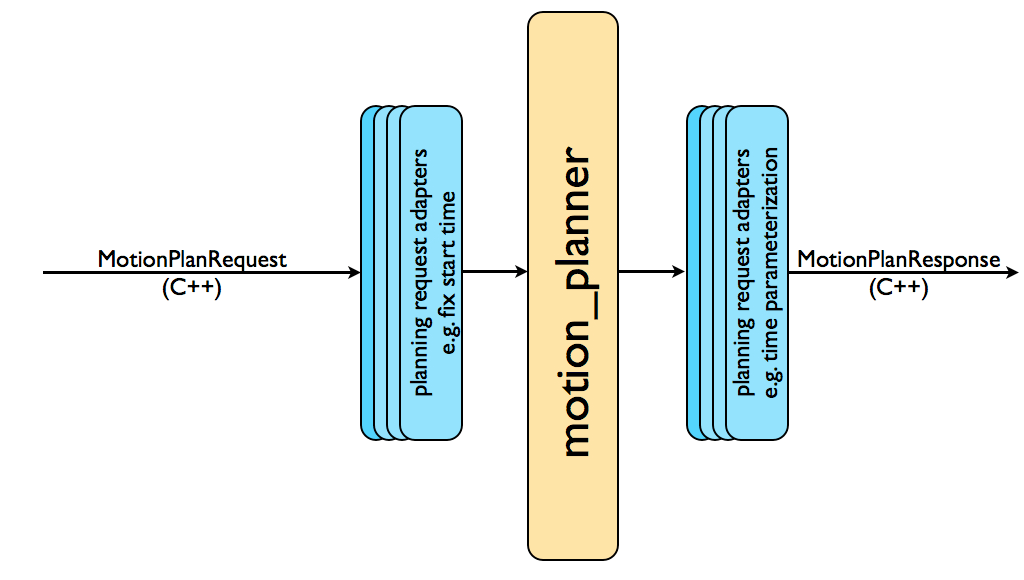
Moveit中Motion Planning Pipeline的理解
官方文档
官方tutorial中关于Motion Planning Pipeline的介绍并不详细,但博主在官方documentation找到了比较详细的解释。
先放出官方的解释: The complete motion planning pipeline chains together a mot…

ROS操作系统基本命令汇总
【1】在使用ROS发布或者订阅消息之前,必须要使用命令roscore将这个ROS内核启动才行;【2】当编写好相关文件之后,一定要返回到ROS工程目录下,进行编译,具体操作是:
$ cd ~/catkin_ws
$ catkin_make
$ sourc…
【ROS系列】坐标系转换介绍和对齐
一、坐标系简介
本篇文章介绍:ECEF、ENU、UTM、WGS-84坐标系(LLA)
1.1、ECEF坐标系
ECEF坐标系也叫地心地固直角坐标系。
原点:地球的质心,
x轴:原点延伸通过本初子午线(0度经度)和赤道&am…
Ros-gazebo xacro文件命名空间
xacro是urdf模型文件的升级版。如果想要在gazebo中用ros的spawn-model以<group ns"$arg(namespace)">同时打开多个这个xacro模型,要注意xacro文件中不要设置绝对的命名空间! <gazebo><plugin name"gazebo_ros_control&quo…

ros自定义消息包无法编译生成.h文件的问题解决
ros自定义消息包无法编译生成.h文件的问题解决 想要创建一个ROS功能包专门存放自己自定义的消息,想将这些消息都生成.h,可以由别的功能包来调用。 但是参照网上的诸多帖子未能解决,例如 https://blog.csdn.net/feidaji/article/details/10360…
ubuntu1804安装多版本pcl
目录写在前面准备安装依赖编译源码pcl1.8pcl1.10使用参考完写在前面
1、本文内容 ubuntu1804安装多版本pcl(pcl1.8以上版本) 2、平台 ubuntu1804 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/125600181
准备
创建pcl文件夹
mkdir pc…

ros+kinetic+人脸识别+百度ai+python
本文基于百度AI进行人脸识别,在众多人脸中匹配人脸库中的人脸。
首先创建百度AI网站帐号: 进入控制台: 创建应用可以在应用中创建自己的人脸库。
#!/usr/bin/env python
import rospy
from PIL import Image
from std_msgs.msg import Stri…

四旋翼利用mavros进行GPS坐标指点飞行
先介绍一般px4飞控的xyz坐标指点飞行:
利用mavros的 /mavros/setpoint_raw/local 话题可以发送东北天(ENU)坐标给px4飞控进行指点飞行。ENU坐标原点在起飞点,东向为x坐标,北向为y坐标,天向为z坐标。z坐标高…
roslaunch px4 multi_uav_mavros_sitl_sdf.launch报错
转载自:https://www.cnblogs.com/pig-fly/p/13971458.html
在试图运行multi_uav_mavros_sitl_sdf.launch时报错: while processing /home/sp/src/Firmware/launch/single_vehicle_spawn_sdf.launch: Invalid <param> tag: Cannot load command p…

ros(Melodic)记录
目录写在前面安装ros melodic例程turtlesimTF点云命令编译消息资料参考完写在前面
1、本文内容 ros入门基础 2、平台 windows10, vmware workstation, ubuntu1804 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/125223367
安装ros melod…
rviz闪退原因和解决办法
rviz一启动就闪退,可能是因为一些rviz中读的话题数据有误,比如path、pose中的四元数为(0,0,0,0),rviz显示不了这样的位姿,就会自动关闭。
而这样的不合格的数据往往是话题初始化没做好,默认都给了0。修改四元数初始值…

gazebo model的sdf文件中的uri路径
让我们先看一个gazebo模型的sdf文件iris_depth_camera_down.sdf
<sdf version1.5><model nameiris_depth_camera_down><include><uri>model://iris</uri></include><include><uri>model://depth_camera_new</uri><p…
msg消息及自定义msg消息
msg消息及自定义msg消息
1.1 基本概念
msg消息 是ROS topic通讯节点间传递的内容。msg消息描述的是业务间传递数据,也可以理解为业务间数据的抽象化。
1.2 常见Msg消息
1.2.1 std消息
std消息属于基本数据类型消息,和python类似,描述的是…
rosbridge使用案例心得总结之_第四篇在虚拟机中安装ROS
在虚拟机上基于ubuntu20.04安装ros ROS Noetic有两种方式: 1)第一种方式是我们常用的传统安装官方步骤一步一步安装即可,可以参照以下安装方式:ROS Noetic入门笔记(一)在ubuntu20.04中安装ROS Noetic并简单…
Raspberry Pi 上 ROS 发布者/订阅者控制 GPIO 状态
ROS 发布者
在本教程中,我将向您展示如何在 Raspberry Pi 上编写 ROS Python 发布者。
通过以下代码示例,您将学习如何使用 ROS 发布 GPIO 状态。为此,我们将使用具有最少硬件设置的简单按钮。您将看到从设置环境到编写代码再到测试的所有步…

ros安装全程及校验
本文参考了:https://www.cnblogs.com/liu-fa/p/5779206.html,这位博主写的很好,进行点赞! 1.Ubuntu与ROS版本的选择,需要留意的是要对应好,这个最好上网查一下,ROS 虽说也叫操作系统࿰…
Ubuntu 20.04 配置 realsense
一、安装 librealsense
参考 librealsense 的 github 官方教程
librealsense/doc/distribution_linux.md at master IntelRealSense/librealsense GitHub
创建服务器公钥
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsens…
RK3399安装机器人系统—ROS
文章目录
一、简介:
二、安装ros
2.1 首先用putty 链接rk3399开发平台 2.2、修改/etc/NetworkManager/NetworkManager.conf 配置
论文思路:移动机械臂自主开门策略仿真研究
移动机械臂自主开门策略仿真研究——哈尔滨工业大学
①移动机械臂的ROS和Gazebo仿真平台搭建和开门任务分析
②使用激光雷达对门进行目标检测,确定出门的位置和姿态,在检测出门的基础上,使用激光雷达和立体相机数据融合的方式确定门把手的位…
ERROR:Quaternion has length close to zero... discarding as navigation goal解决办法
原因:变量origation_w为0了

ROS1学习笔记:tf坐标系广播与监听的编程实现(ubuntu20.04)
参考B站古月居ROS入门21讲:tf坐标系广播与监听的编程实现 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、创建功能包二、创建代码2.1 以C为例2.1.1 配置代码编译规则2.1.2 编译整个工作空间2.1.2 配置环境变量2.1.4 执行代码2.2 以Python为例2.2.1 配置代码…
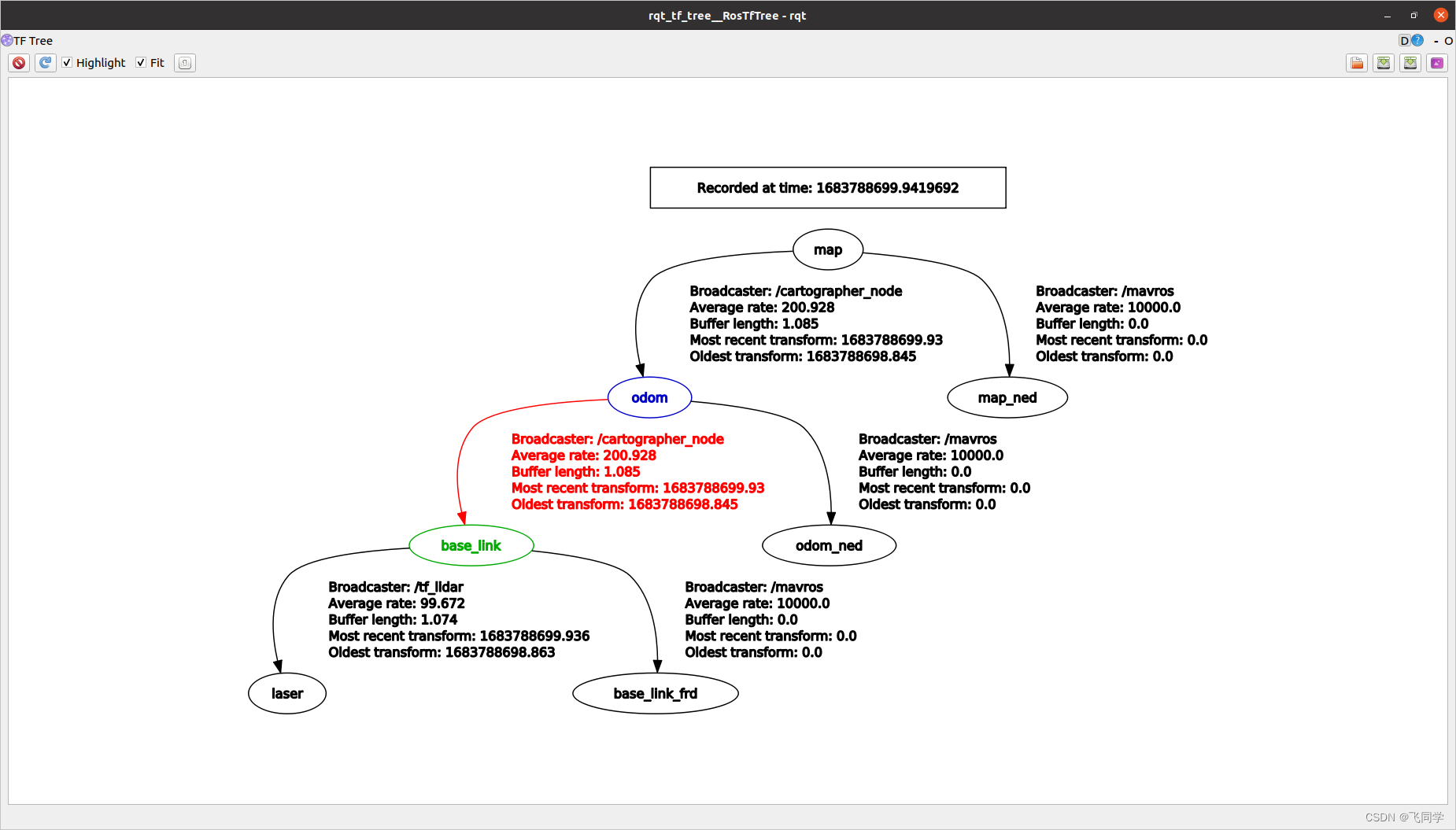
关于cartographer建立正确关系树的理解
正确的TF关系map----odom----base_link----laser base_link是固定在机器人本体上的坐标系,通常选择飞控 其中map–odom 的链接是由cartographer中lua文件配置完成的
map_frame "map",
tracking_frame "base_link",
published_frame "b…
Ubuntu20.04.4安装ROS Noetic教程
一:配置系统软件源,软件源初始化
1:配置系统软件源
sudo cp /etc/apt/sources.list /etc/apt/sources.list.backup2:编辑系统软件源
sudo gedit /etc/apt/sources.list3:20.04LTS源码镜像复制到sources.list文件中 …
利用rostopic pub发布消息进行调试
目录
rostopic echo显示消息
rostopic info查看话题的消息类型
rosmsg info查看消息格式
rostopic pub发布消息 rostopic echo显示消息
$ rostopic echo /config/ndt
header:seq: 11stamp:secs: 0nsecs: 0frame_id:
init_pos_gnss: 0
x: 0.0
y: 0.0
z: 0.0
roll:…

plotjuggler实时绘制ros topic数据流
ros里安装plotjuggler用:
sudo apt install ros-melodic-plotjuggler-ros
不要用:
sudo apt install ros-melodic-plotjuggler
这样,plotjuggler才会显示出ros topic subscriber!!! ros里启动plotjuggl…

使用YOLO进行物体识别+ubuntu16.04+ROS
进行了一个星期的探索终于成功了。
简单进行一下整理思路:
1. 电脑必须安装git,然后在自己电脑上生成密钥,这里具体方法百度,默认大家都会了。
2. 生成密钥之后在home文件夹下找到.ssh文件夹,如果没用找到的话按ctr…
【ROS】—— ROS通信机制——实践与练习(六)
文章目录前言1. 话题发布1.1 C方式实现1.2 python实现2. 话题订阅2.1 C实现2.2 python实现3. 服务调用3.1 C3.2 python4. 参数设置4.1 C4.2 python4.3 运行4.4 其他方式4.4.1 修改小乌龟节点的背景色(命令行实现)4.4.2 启动节点时,直接设置参数4.4.3 通过launch文件…

通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(二)
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(二) mp4媒体流数据
#include <ros/ros.h>
#include <signal.h>
#include <sensor_msgs/Image.h>
#include <message_filters/subscriber.h>
#include <message_filters/synchroniz…

ROS:文件系统以及命令
目录 一、ROS文件系统二、package.xml三、CMakelists.txt四、ROS文件系统命令4.1增4.2删4.3查4.4改4.5roscode4.6rosrun4.7roslaunch 一、ROS文件系统
ROS文件系统级指的是在硬盘上ROS源代码的组织形式,其结构大致如下图所示:
WorkSpace --- 自定义的…
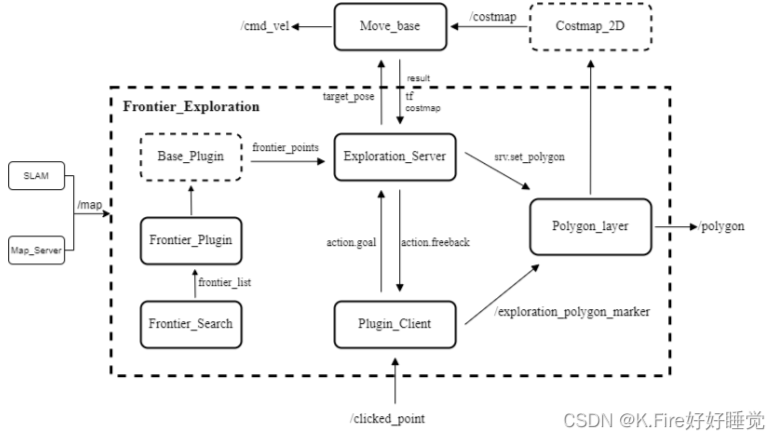
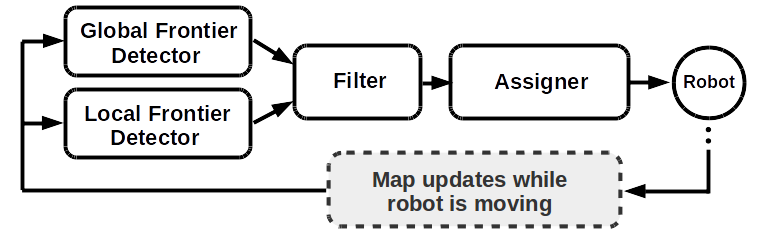
【自主探索】基于 frontier_exploration 的单个机器人自主探索建图
文章目录 一、概述1、功能2、要求 二、使用方法1、用于运行演示2、用于开发人员2.1. 探索无/地图数据2.2. 使用 /map 数据进行探索 三、提供的组件1、explore_client1.1. 调用的操作1.2. 订阅主题1.3. 发布主题 2、explore_server2.1. 提供的操作2.2. 调用的操作2.3. 调用的服务…
ROS下安装使用kinect2
使用相机难免少不了标定,ros下有标定kinect深度相机和彩色相机的方法,就在ros下趟一遍坑,特此记录:
1. 安装libfreenect2 libfreenect2为Kinect2提供了一个开源驱动程序,这个驱动并不支持xbox one,.同事也提供了深度图像传输以及RGB图像的联合配准. 安装步骤(我选择安装在ho…
【ROS】Nav2源码之nav2_behavior_tree详解
【ROS】郭老二博文之:ROS目录
1、简介
nav2_bt_navigator实现ROS2节点以行为树的方式来处理。
nav2_behavior_tree模块提供如下功能: 一个c++模板类,可以轻松地将ROS2 动作(actions)和服务(services)集成到行为树(Behavior Trees)中。特定于导航的行为树节点。通用的Behav…
tf用法汇总和代码实战
文章目录 1. 使用 tf 监听坐标变换(Transform Listener)导入必要的模块创建监听者节点 2. 使用 tf 广播坐标变换(Transform Broadcaster)导入必要的模块创建广播者节点 运行节点 tf用法汇总和代码实战 #include <tf/tf…

虚拟机 + Ubuntu22.04 + ros2 (humble) colcon build turtlebot3_node失败的解决方案
一、问题描述
在虚拟机Ubuntu22.04中安装了ROS2(humble),下载turtlebot3。在colcon build --symlink-install 编译的过程中turtlebot3_Fake_node一直失败,无法正常运行,影响后面的仿真测试。 二、解决方案
查阅相关资料后发现问…
【ROS】Nav2源码之nav2_planner详解
1、简述
nav2_planner是路径规划器,把起始位置、姿势的信息输入nav2_planner模块,将会生成可行路径。 nav2_planner路径规划器和nav2_controller控制器相似,也使用插件的形式加载不同的路径规划器。 常用的路径规划器插件有: 1)NavFn Planner(使用 A* 或 Dijkstras 展开…

ROS探索总结(十六)——HRMRP机器人的设计
1. HRMRP简介HRMRP(Hybrid Real-time Mobile Robot Platform,混合实时移动机器人平台)机器人是我在校期间和实验室的其他小伙伴一起从零开始设计并开发的一款机器人平台,其中大部分扩展电路、驱动和ROS相关的底层功能都是我们自己…
【ROS】Nav2源码之nav2_costmap_2d详解
【ROS】郭老二博文之:ROS目录
1、简述
nav2_costmap_2d包负责构建环境的2D成本图costmap,它由几个描述环境的“层(layers)”数据叠加而成。 它可以通过地图服务器或本地滚动窗口初始化,并通过从传感器获取观测数据来更新层。 nav2_costmap_2d也使用了插件,通过插件接口…
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示 #include <ros/ros.h>
#include <signal.h>
#include <sensor_msgs/Image.h>
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include &…
rosnode ping指令
节点是一个可执行文件,它可以通过ROS来与其他节点进行通信(这些节点可以分布在不同设备上面的软件直接,例如一台在Windows上面,一台在Ubuntu,一台在stm32上面)
节点是ROS中非常重要的一个概念,为了帮助初学者理解这个…

ROS-机器人操作系统 - - 带你一文入门
ROS-机器人操作系统----带你一文入门 1.1.ROS发展史 2000 ROS起源: 斯坦福大学机器人软件系统框架2007 ROS正式发布:柳树车库(willow Garage) 发起2010 ROS 1.0 发布ROS逐渐流行:ROS,Indigo,ROS kinetic(LTS) 1.2.什么是ROS ROS 实质上并不是操作系统,而是中间件/类操作系统 硬…
ROS话题(Topic)通信:自定义msg - 例程与讲解
在 ROS 通信协议中,数据是以约定好的结构传输的,即数据类型,比如Topic使用的msg,Service使用的srv,ROS 中的 std_msgs 封装了一些原生的数据类型,比如:Bool、Char、Float32、Int64、String等&am…
如何在ROS下编写自己的节点来订阅话题(C++)
本文暂定为记录,目前写了一个订阅话题的节点 –2015.10.13
一、首先建一个包
我的工作空间catkin_ws事先建好了,路径是/home/siat/catkin_ws 然后运行以下命令在src文件夹下建立test包
$ cd ~/catkin_ws/src
$ catkin_create_pkg test roscpp
注意…

随手记录:Livox 时间戳修改为ROS时间戳
参考与前言
传感器类型:Livox-Mid70
参考链接:Ubuntu20.04系统安装Livox ROS Driver
官方驱动:https://github.com/Livox-SDK/livox_ros_driver
碎碎念:之所以要改成rostime主要是 提取pcd的时候发现这个timestamp 300.xxx 打…
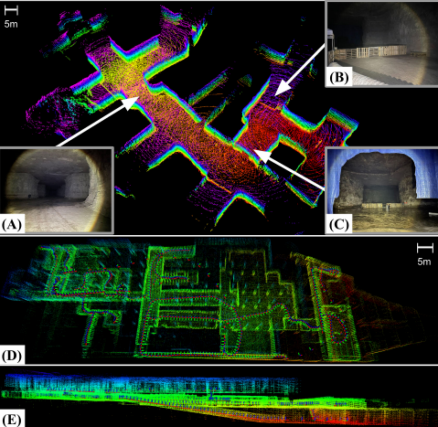
【文献分享】NASA JPL团队CoSTAR一大力作:直接激光雷达里程计:利用密集点云快速定位
论文题目:Direct LiDAR Odometry: Fast Localization With Dense Point Clouds
中文题目:直接激光雷达里程计:利用密集点云快速定位
作者:Kenny Chen, Brett T.Lopez, Ali-akbar Agha-mohammadi
论文链接:https://arxiv.org/pd…
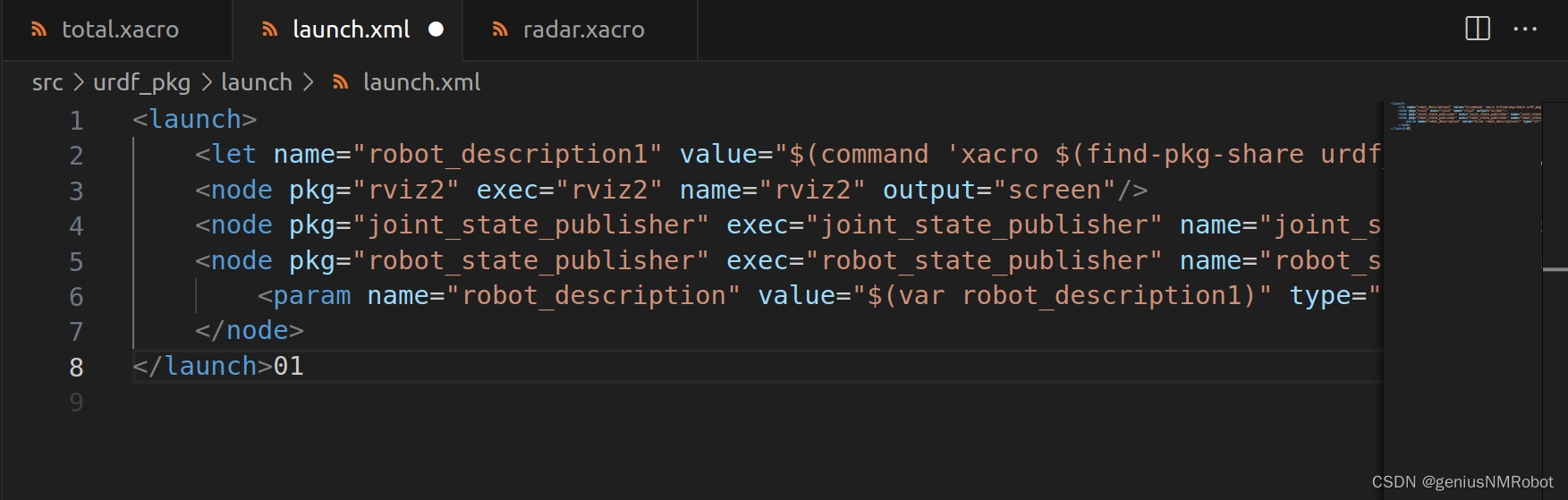
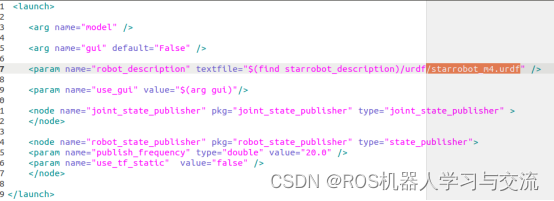
RLException: Invalid <param> tag: Cannot load command parameter [robot_description]: no such command
在ROS机器人开发实用案例分析中第五章搭建模拟机器人手臂里面的rrbot_rviz.lunch如下所示
<launch>
<!-- set parameter on Parameter Server-->
<arg name"model"/>
<param name"robot_description" command"$(find xacro)/xa…
【chatgpt代码系列】roslaunch的python接口实现ros节点生命周期管理
Q1:请帮我写一段python管理程序,使用了roslaunch的api接口,用于管理ros各个节点的生命周期
好的,以下是一份简单的Python代码示例,可以使用roslaunch API接口管理ROS节点的生命周期:
import rospy
import…

3 ROS1通讯编程提高(2)
3 ROS1通讯编程提高3.3 动态重配参数3.3.1 动态重配参数作用3.3.2 动态重配参数基本编程3.3.2.1 创建动态参数项目3.3.2.2 创建动态参数文件3.3.2.2 配置动态参数文件3.3.2.3 编译C代码作为服务端3.3.2.4 编译Python代码作为服务端3.3.3 动态重配参数总结3.4 launch文件3.4.1 n…
ROS实现一个节点同时发布订阅多个话题(C++版)
如果想在一个节点同时发布订阅多个话题就要使用到多线程机制,在C中如何使用多线程,在C中开多线程模板已经有了介绍,就是下面这个:
#include<thread>void listenThread() {// 线程1内容
}void sendThread() {// 线程2内容
}…
ERROR: your rosdep installation has not been initialized yet
这个错误表示你的 rosdep 还没有初始化。rosdep 是一个 ROS 中的系统依赖管理工具,用于安装和配置需要的系统依赖包。在使用 rosdep 之前,需要先通过 rosdep update 命令初始化它。这个命令会连接远程服务器来更新 rosdep 的数据源,以获取所有支持的 ROS 版本和平台的依赖信息。…
使用roslibjs案例心得总结之_第21篇web发布waypoints指定路径导航实现
目录
简介
一、启动仿真
二、启动rosbridge 接口
三、发送waypoints目标点
3.1、python脚本
关于ROS学习的一些反思
距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧。这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用,玩过we…

使用 Jupyter 分析 ROS 消息时间间隔抖动数据
ROS 是一个分布式机器人操作系统软件框架,节点之间通过松耦合的方式进行组合,包括使用 Topic、RPC 服务和参数服务器等方式进行通信。其中,Topic 是最常见的一种通信方式,例如一个雷达传感器节点实时采集三维点云数据,…
记录 搭载小车 运行激光slam lio-sam fast-lio2
用了将近一个月搭载了一台履带车
其中 主控:NUC i7-8559U 激光雷达为:velodyne16线和hesai64线 IMU为:轮趣N100 mini
对imu使用上位机进行调平矫正 设置输出400HZ
对外参标定
首先使用velodyne16线 安装驱动直接运行,没遇到啥…
ROS CMakeLists.txt内容探究
ROS中的CMakeLists.txt主要包括下面几个部分:
1、cmake_minimum_required() //要求的CMake最小版本
2、project() //功能包名称
3、find_package() //指明编译依赖的其他功能包
4、add_message_files()、add_service_files()、add_action_files() //指定消…
ROS部署到机器人小车并实现底层电机控制过程中遇到的问题
任务:在实验室原有的基于can总线控制的移动机器人平台上应用ROS步骤:1.ROS推荐系统为ubuntu,首先需要重装机器人的操作系统。 2.下载并安装ROS。 3.原can卡不支持linux系统,须更换机器人的usbcan设备。 …

Ubuntu16.04 安装ROS Kinetic
参考网址:https://blog.csdn.net/qq_40936141/article/details/86241910
记录一下安装过程 Ubuntu16.04 安装ROS Kinetic一、 安装ROS1、添加ROS软件源2、添加密钥3、更新软件包4、安装ROS Kinetic5、初始化ROSrosdep init ROS安装问题解决方案6、安装rosinstall二…
【Autoware规控】PurePursuit纯跟踪控制节点
PurePursuit轨迹跟踪控制。 文章目录1. 技术原理2. 代码实现3. 算法改进1. 技术原理
轨迹跟踪模块主要负责控制车辆沿着规划的路径点行驶,即根据车辆当前的速度、位姿及路径点信息,计算出下一时刻车辆的控制参数(速度和转向)&…

ROS的软件包、节点
一、同一个包的文件分布在不同的文件夹中
对于turtle_tf软件包来说他的launch文件存在/opt/ros/hydro/share/turtle_tf/launch中,但是这个包的节点比如turtle_tf_broadcaster.py却存在/opt/ros/hydro/lib/turtle_tf中 二、rosrun找不到可执行文件的问题
新打开电脑…

ubuntu18.04+realsenseD455制作TUM数据集
教程目录 一、本机环境二、安装RealSense SDK三、录制rosbag四、制作数据集四、安装ROS-RealSense五、测试数据集一、本机环境 Ubuntu系统ROS系统RealSense18.04melodicD455二、安装RealSense SDK
1、首先注册服务器的公钥
sudo apt-key adv --keyserver keyserver.ubuntu.co…
cartographer,ros,路径规划近两年的工作笔记
马上转入cartographer的去ros移植了,随便记录一下研究cartographer和ros这些天来的摸鱼笔记吧虽然很多人对用ros做产品嗤之以鼻,但是我个人是不排斥的,对代码能力有限的人群来说这是产品化最快的方式!
敝帚自珍~~~继续加油~~~ 建图总结
odom 尤其是转弯的时候,存在累积误…
ROS2 python 通信demo
已创建包:test_kiki
test_kiki/test_kiki文件夹
两个py文件即两个node talk.py
https://raw.githubusercontent.com/ros2/examples/humble/rclpy/topics/minimal_publisher/examples_rclpy_minimal_publisher/publisher_member_function.py
listen.py
https://…

ROS功能包编译报错fatal error: xxxxConfig.h: 没有那个文件或目录的解决方法及原理介绍
在ROS中,我们常使用动态调参工具或参数配置文件来进行参数调节,在编译时会生成对应的Config.h文件,如本文例子中的MPCPlannerConfig.h文件 一、报错原因及解决方法 在编译时报以下错误的原因是在编译生成可执行文件mpc_ros的过程中需要使用MP…
底盘获取线速度,imu获取偏航角速度数据组合为车辆速度信息
需求:获取geometry_msgs::TwistStamped格式的速度信息(角速度+线速度) 方法1:从底盘获取线速度,imu获取偏航角速度数据,然后组合数据发布信息。 方法2:通过融合定位输出的位姿(x,y,yaw),通过前后帧计算线速度和偏航角速度,然后发布信息 方法1实现: 头文件:
#p…
ROS学习记录:在ROS中用C++实现激光雷达避障
前言
本文建立在成功获取激光雷达数据的基础上,详细参考
在ROS中用C实现获取激光雷达的数据
一、实现思路 二、在VScode中打开之前编写好的lidar_node.cpp 三、在lidar_node.cpp中写入如下代码
#include <ros/ros.h>
#include <std_msgs/String.h>
…
如何在ros上编写一个简单的node并进行通信
如何在ros上编写一个简单的node并进行通信。 这里采用ros教程的例子,稍作修改。 与C不同的是,python不需要在package中加入message_runtime以及message_generation.
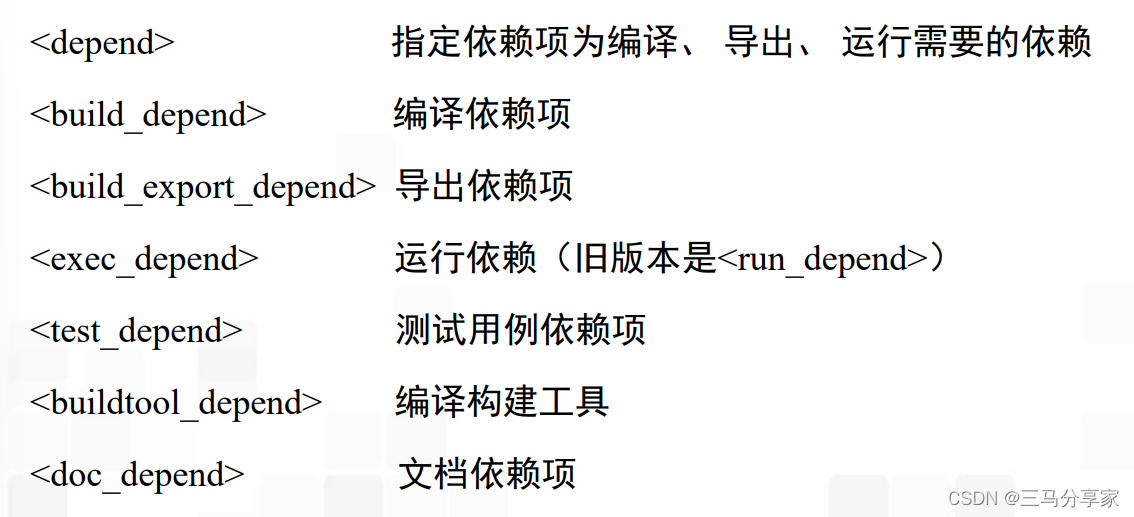
我自己的package文件如下: ..............<buildtool_depend>catkin…
防火墙NAT映射-端口映射-从零开始学RouterOS系列05
本教程用途:
有IPV4公网IP的企业需要把内网网站,CRM,ERP等服务器能在公网访问。
那么什么是端口映射(Port-Forwarding),那么就是要了解一下NAT和NAPT。
NAT是网络地址转换。
NAPT是网络地址端口转换。 …
QT Creator 同时启动多个ROS launch文件
有时候跑一个ros的应用,需要启动多个ros launch文件,搞得人心烦意乱。这里参考网上给出的做法,利用qt creator,制作一个简单ui,通过点击按钮,同时启动多个launch文件。过程如下:
1. Ubuntu 16.…
KITTI数据集转化为ROS bag包(解决各种类型数据集,实测有效)
KITTI数据集转化为ROS bag包(解决各种类型数据集,实测有效)
1.raw data数据集转化 raw data数据集的转化可以参考我之前的博客 将KITTI数据集转化为ROS bag包——kitti2bag使用教程 2.其他数据集转化 除了上面kitti2bag数据集转化工具外&…
noetic 怎么下载robotiq_modbus_tcp 从而使用robotiq二指夹爪
1,会科学上网
2,
# Modbus TCP
rosdep install robotiq_modbus_tcp3,报错
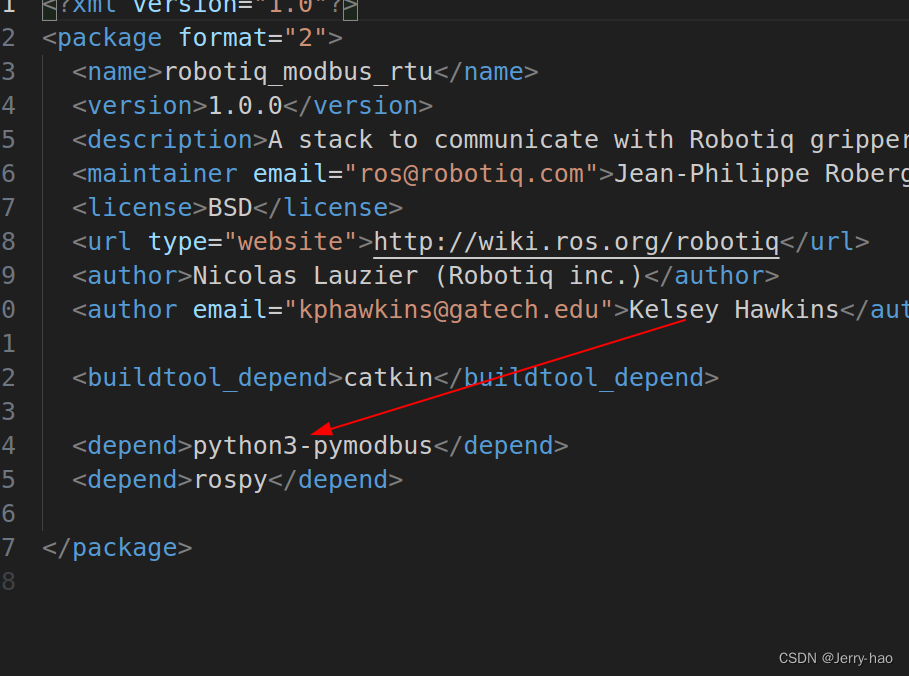
4,去robotiq的功能包里面找两个大爷(tmd) 分别修改package.xml 本来是python , 然后分别修改成python3 然后参考其他…
ROS中的订阅模式、服务模式、action模式
在ROS的通信方式中存在订阅-发布模式,服务模式,动作服务模式。 1、订阅-发布模式 使用订阅-发布模式进行通信,首先要知道主题的存在。发布者向主题发布消息,订阅者订阅主题获取消息。其中订阅者不知道消息的来源,发布者…


轨迹规划 | 图解路径跟踪PID算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 PID控制基本原理2 基于PID的路径跟踪3 仿真实现3.1 ROS C实现3.2 Python实现3.3 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)&a…
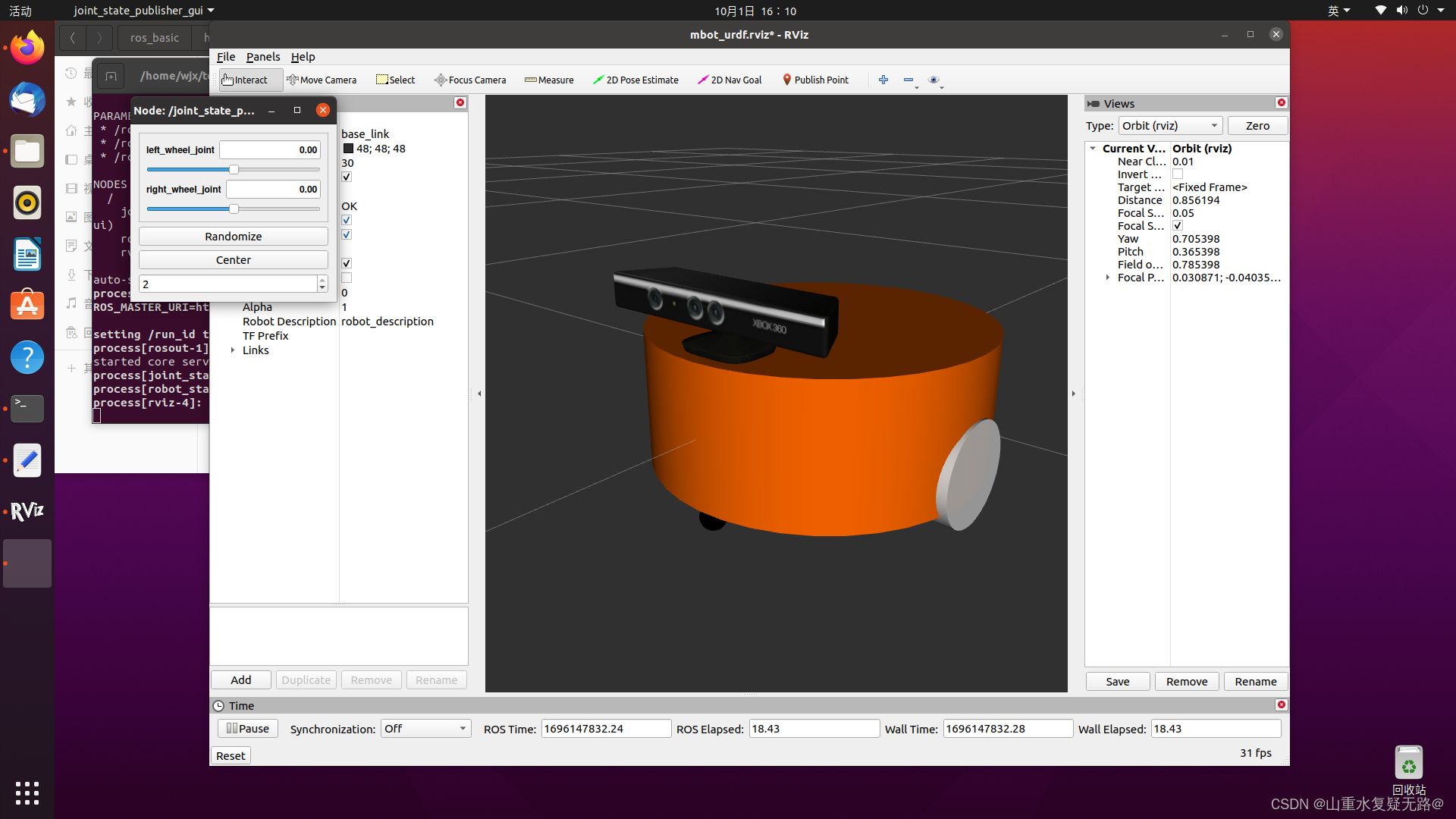
![ROS Robotics By Example No transform from [left_wheel] to [base_link]](https://img-blog.csdnimg.cn/02c5749210804c37bcc1e4aa9e1c65e8.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBALS3lpKnooYzlgaXlnLDlir_lnaQtLQ==,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
ROS Robotics By Example No transform from [left_wheel] to [base_link]
1、问题描述
在第二章中搭建双轮机器人
<?xml version"1.0"?>
<robot name"dd_robot"><!-- base link--><link name"base_link"><visual><origin xyz"0.0 0.0 0.0" rpy"0.0 0.0 0.0"/…
ROS引用其他功能包头文件,报错fatal error: creating_ros_library/example_ros_class.h: 没有那个文件或目录
在ROS工作空间中引用其他功能包的头文件报出以下错误 fatal error: creating_ros_library/example_ros_class.h: 没有那个文件或目录 包B用包A的头文件.h需要对A,B的CMakeListes进行修改
修改A的CMakeListes 如下
catkin_package(INCLUDE_DIRS include
# LIBRARI…
ROS1学习笔记:launch启动文件的使用方法
参考B站古月居ROS入门21讲:launch启动文件的使用方法 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、launch的文件结构二、launch的文件语法2.1 根元素2.2 参数设置2.3 重映射和嵌套三、相关示例simple.launchturtlesim_parameter_config.launchstart_tf_d…
ubuntu16.04安装ROS+Gazebo
ubuntu16.04安装ROS参考文章 ros安装(一键最简安装,吹爆鱼香ROS,请叫我鱼吹) ROS篇——Ubuntu快速一键安装ROS或ROS2(通用) ubuntu安装ROS melodic(最新、超详细图文教程) 配置ubuntu以及安装ros2必要环…
CasADi - 最优控制开源 Python/MATLAB 库
系列文章目录 文章目录 系列文章目录前言一、介绍1.1 CasADi 是什么?1.2 帮助与支持1.3 引用 CasADi1.4 阅读本文档 二、获取与安装三、符号框架3.1 符号 SX3.1.1 关于命名空间的说明3.1.2 C 用户注意事项 3.2 DM3.3 符号 MX3.4 SX 和 MX 混合使用3.5 稀疏类3.5.1 获…

通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(三)
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(三) 不使用base64编码方式传递
#include <ros/ros.h>
#include <signal.h>
#include <sensor_msgs/Image.h>
#include <message_filters/subscriber.h>
#include <message_filter…
【ROS】Nav2源码之nav2_smoother(平滑器)详解
【ROS】郭老二博文之:ROS目录
1、简述
从路径规划模块’ nav2_planner 中给出路径通常是不平滑的。 所谓平滑器就是使规划的路径更平滑、平稳,可以运行的更优雅,并且减少硬件的磨损。 nav2_smoother在Nav2导航中的定义了平滑器接口的,nav2_smoother加载了一组平滑器插件,…
【ROS2系统】colcon编译器的使用 (持续更新ing)
colcon编译器
参考链接:https://www.rstk.cn/news/33292.html?actiononClick 指令教学:https://blog.csdn.net/u014603518/article/details/127717928
基础指令colcon build
参数及效果
无参数
colcon build : 编译子环境下的全部ROS2项目依赖
--…

Gazebo GPU加速【gzserver running in GPU】
文章目录 Gazebo GPU加速1. 问题2. 解决办法2.1 本机运行 2.2 headless3. 补充3.1 如何确定的Gazebo为OpenGL渲染3.2 显卡驱动--no-opengl-files3.3 nouveau Gazebo GPU加速
1. 问题
Gazebo仿真帧率极低,fps在10以下,同时显卡驱动已安装,但…
rviz中引入SW的模型
一、SW装配图转urdf
参考链接:https://blog.csdn.net/weixin_45168199/article/details/105755388 这部分直接看参考链接就可以,主要思路如下
1、把sw中的零散零件按照机器人中连杆的分类整合成几个大零件
2、把几个大零件整合成装配体,并…
Ubuntu 20.04 配置 VINS-Fusion-gpu + OpenCV 4.6.0
准备工作: (1)电脑装有 NVIDIA 显卡 (2)安装 ROS noetic/Installation/Ubuntu - ROS Wiki (4)安装 cuda Ubuntu安装cuda_GXU_Wang的博客-CSDN博客 一、安装OpenCV 4.6.0
下载 opencv 源码&…
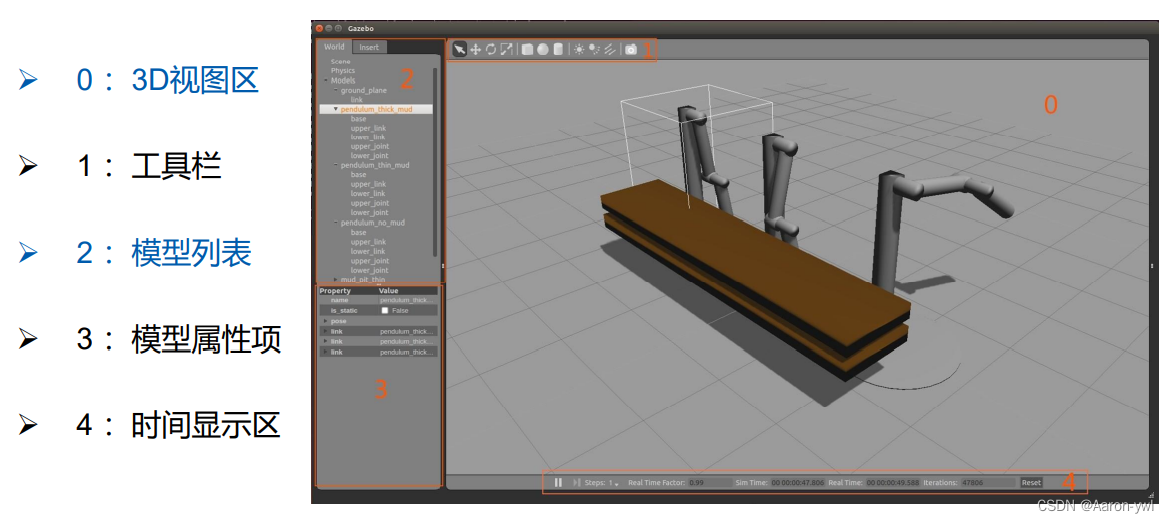
Gazebo基本使用
参考文章 熟悉Gazebo界面 : ROS自学笔记八:Gazebo 搭建环境:Gazebo仿真环境搭建 搭建环境+加载机器人:gazebo仿真环境搭建配置小车运动仿真

ROS如何将拷贝的功能包成功运行在自己的工作空间中
ROS将拷贝的功能包成功运行在自己的工作空间中
(1)将需要的功能包移动到自己工作空间 /src文件夹中
(2)然后编译工作空间catkin_make (3)然后运行launch文件 第一次运行launch文件可能会报错 配置环境…
Ubuntu下安装urdf可视化软件urdf-viz
Ubuntu下安装urdf可视化软件urdf-viz
urdf-viz是一款开源的可视化URDF/XACRO模型的软件,用户可以利用urdf-viz检查模型的准确性及简单地手动控制;支持Windows/MacOS/Linux,非常好用。
安装方法
urdf-viz 是使用Rust-lang编写,所…
ROS2 工作空间 包
source /opt/ros/humble/setup.bash colcon sudo apt install python3-colcon-common-extensions 创建工作空间 mkdir -p ~/ros2_ws/src
编译
ros2_ws目录下
colcon build 创建包
ros2 pkg create --build-type ament_python --node-name my_node test_kiki 编译失败
Sta…
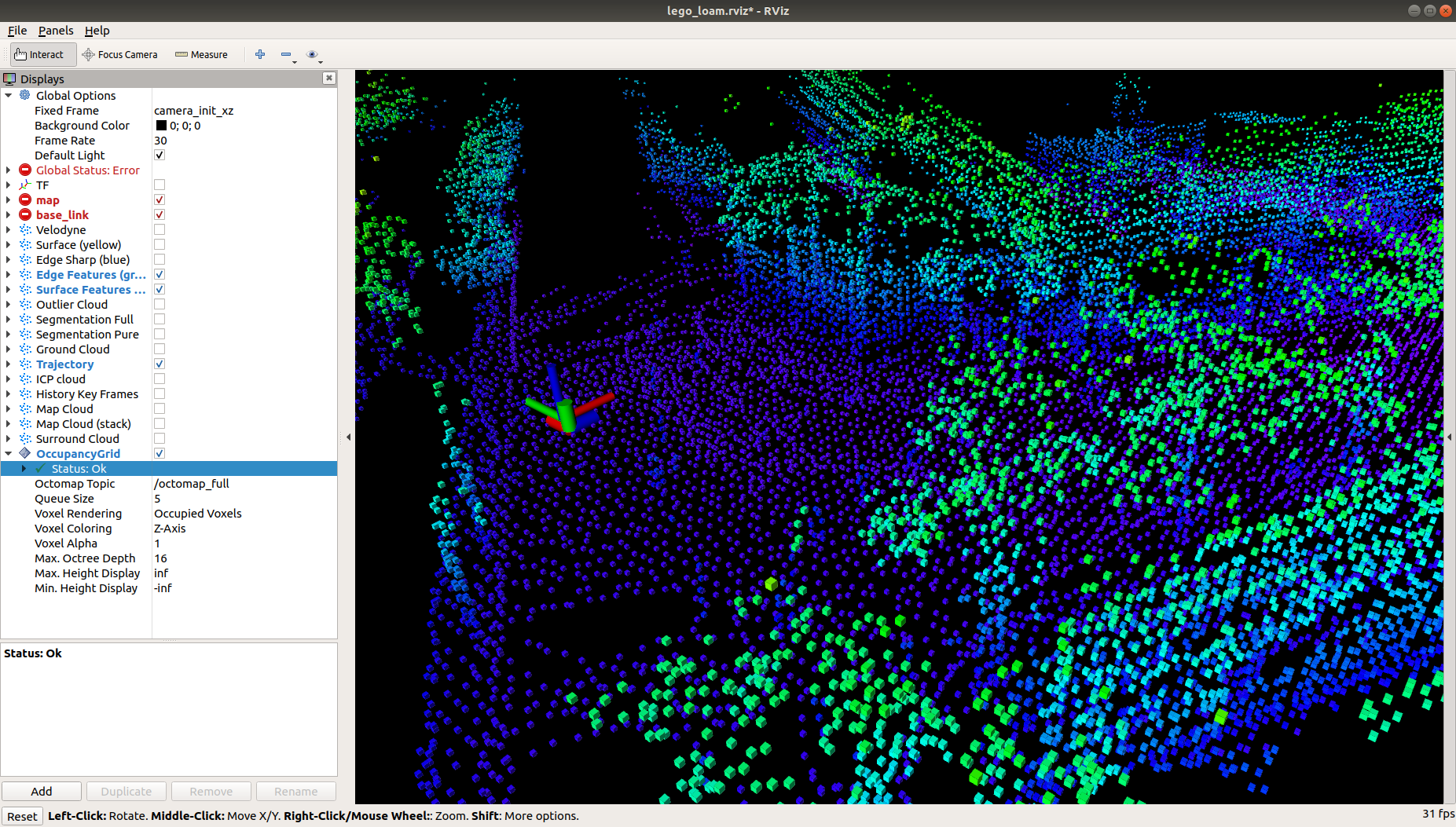
rviz中显示的点云与网格垂直,将保存的pcd文件转为点云在rviz中显示,并使用octomap_server将点云地图转化为八叉树地图和占据栅格地图
文章目录 问题:点云与网格垂直背景解决方法:对点云坐标做变换,绕x轴旋转90度,将z轴指向上方将pcd转成点云,在RVIZ中显示点云图创建launch rviz显示 问题:点云与网格垂直
用lego-loam建图时用rosbag录制相关…
dji uav建图导航系列()ROS中创建dji_sdk节点包(二)实现代码
在前文 【dji uav建图导航系列()ROS中创建dji_sdk节点包(一)项目结构】中简单介绍了项目的结构,和一些配置文件的代码。本文详细说明目录src下的节点源代码实现。 文章目录 1、代码结构2、PSDK部分3、ROS部分3.1、头文件3.1.1、外部调用 node_service.h3.1.2、节点类定义…
仿真机器人-深度学习CV和激光雷达感知(项目2)day5【作业1与答案1】
文章目录 前言作业1答案1 前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容 🌟 预置知识…

ROS : xxxx_<std::allocator<void> > >’ has no member named ‘deserialize’
ros在测试订阅话题函数的时候,出现了如上报错,同下
/opt/ros/melodic/include/ros/serialization.h:136:7: error: ‘class boost::shared_ptr<const xxxxx::xxxxx_<std::allocator<void> > >’ has no member named ‘deserialize’…
ROS机器人构建和深度学习应用
机器人操作系统是机器人研究和公司建模、模拟和原型机器人使用最广泛的软件框架之一。 将您的 ROS 知识应用于实际机器人技术比人们意识到的要困难得多,但是这个标题将立即为您提供创建自己的机器人技术所需的一切!
包含超过 14 个 ROS 机器人项目&…
[ERROR] [1571614395.918484166]: [registerPublisher] Failed to contact master at [localhost:11311] 解决
在ubuntu 16中运行rosrun turtlesim turtlesim_node时 报出以下错误时
[ERROR] [1571614395.918484166]: [registerPublisher] Failed to contact master at [localhost:11311]应该检查是不是ros服务没有开启 可以在一个终端运行roscore 开启服务然后在另外一个终端再运行rosr…
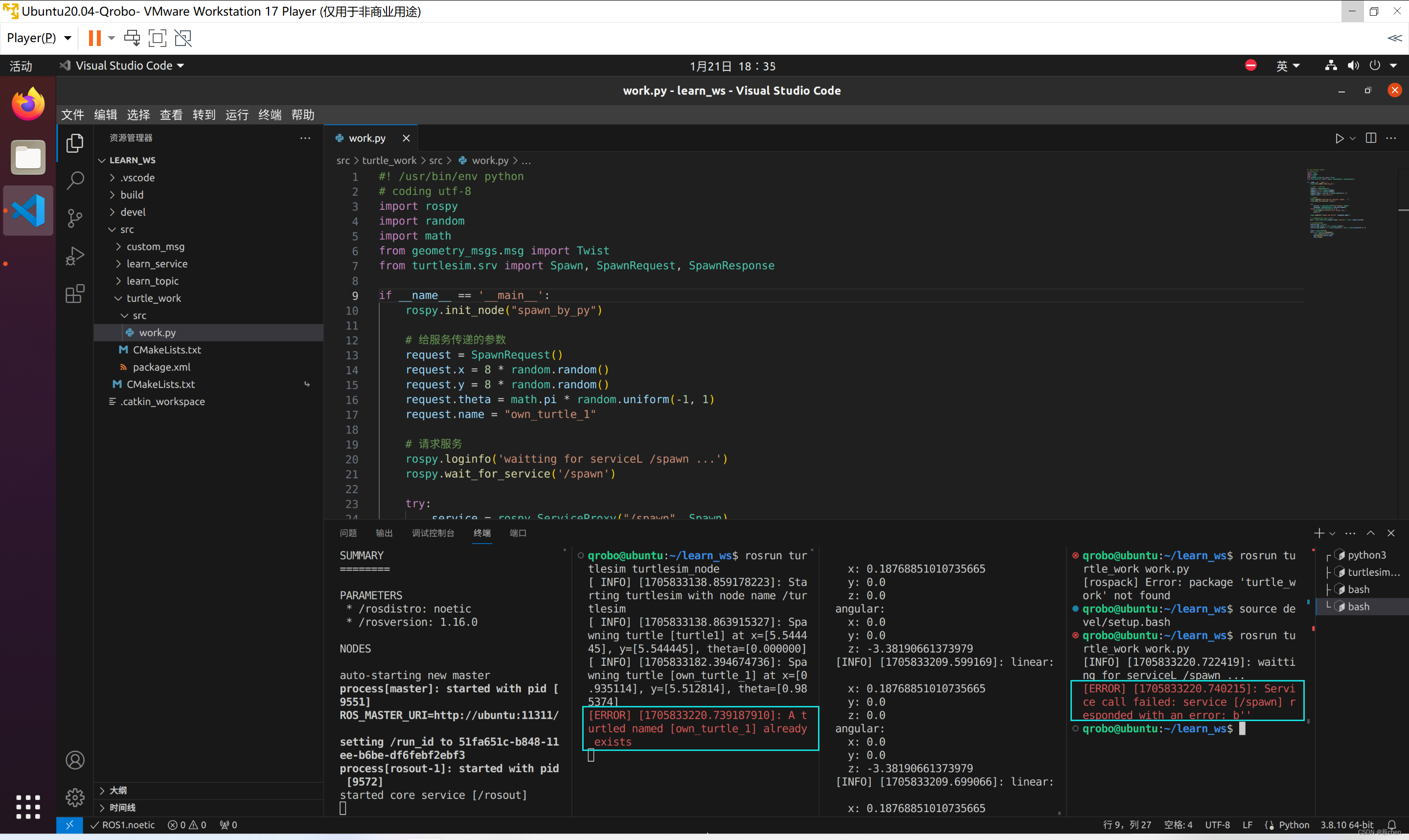
[rospack] Error: package ‘.....‘ not found
在ros编程中如果报出
[rospack] Error: package ..... not found某个包没有找到,则有一下几方面的原因
1 包名写错了2 工作空间真的没有这个包存在3 包所在的ros工作空间没有在ros环境中,此时可以按照以下步骤进行检查 1 env | grep ros 命令查看人环境…
ROS | ros::NodeHandle::param()
文章目录 概述一、定义介绍二、功能作用三、使用方法四、实例演示概述 本节详细介绍了ros::NodeHandle::param()函数的功能及区别。
一、定义介绍 先看一下ros::NodeHandle::param()函数的原型:
bool ros::NodeHandle::param ( const std::string & param_name,T &…

ROS参数服务器(Param):通信模型、Hello World与拓展
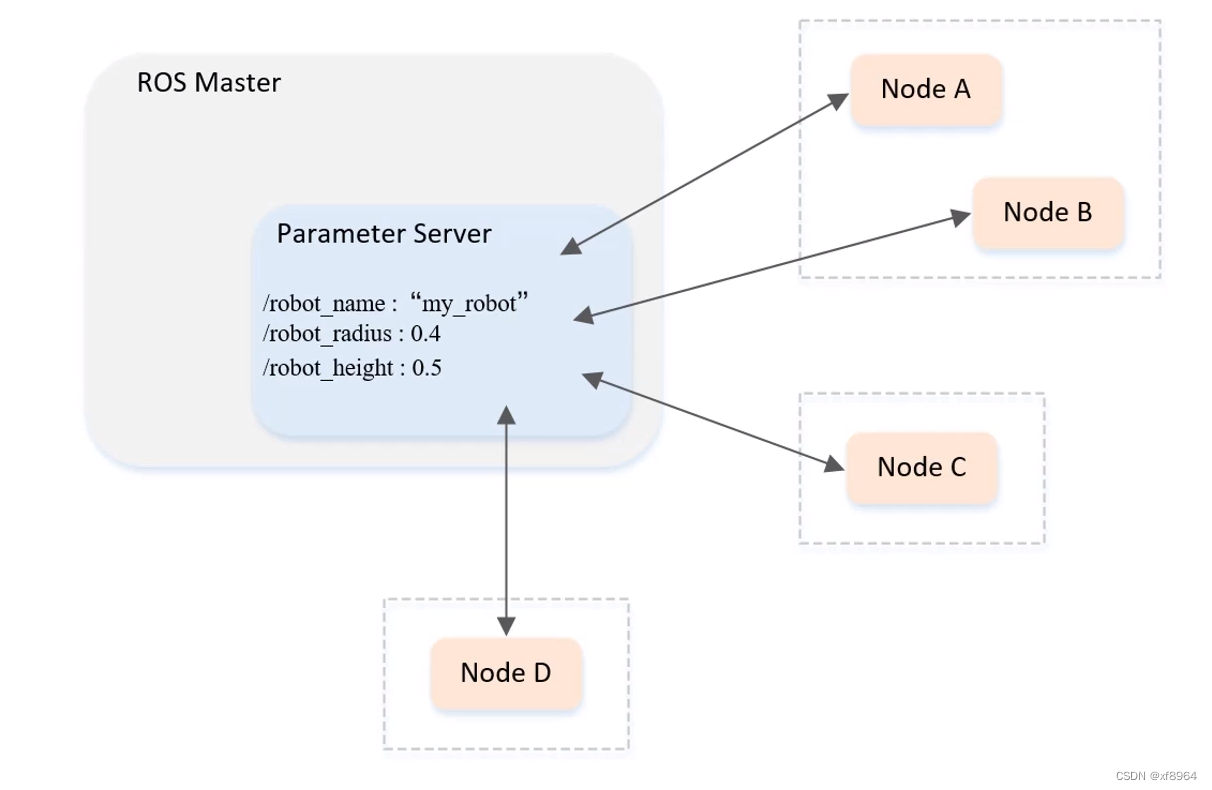
参数服务器在ROS中主要用于实现不同节点之间的数据共享。
参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
使用场景一般存储一些机器人的固有参数&…
ubuntu 22.04源码装ros1 noetic
ubuntu 22.04源码装ros1 noetic 文章目录 ubuntu 22.04源码装ros1 noetic1. 安装依赖2. 更换rosdep相关的rep链接3. 安装 rosdep4. 创建工作空间下载源码并安装5. 编译代码5.1 修复rosconsole* log相关问题**error**5.3 python-sip配置相关5.4 *std::share_mutex* 相关 c11 与c…
【ROS】Nav2源码之nav2_collision_monitor详解
【ROS】郭老二博文之:ROS目录
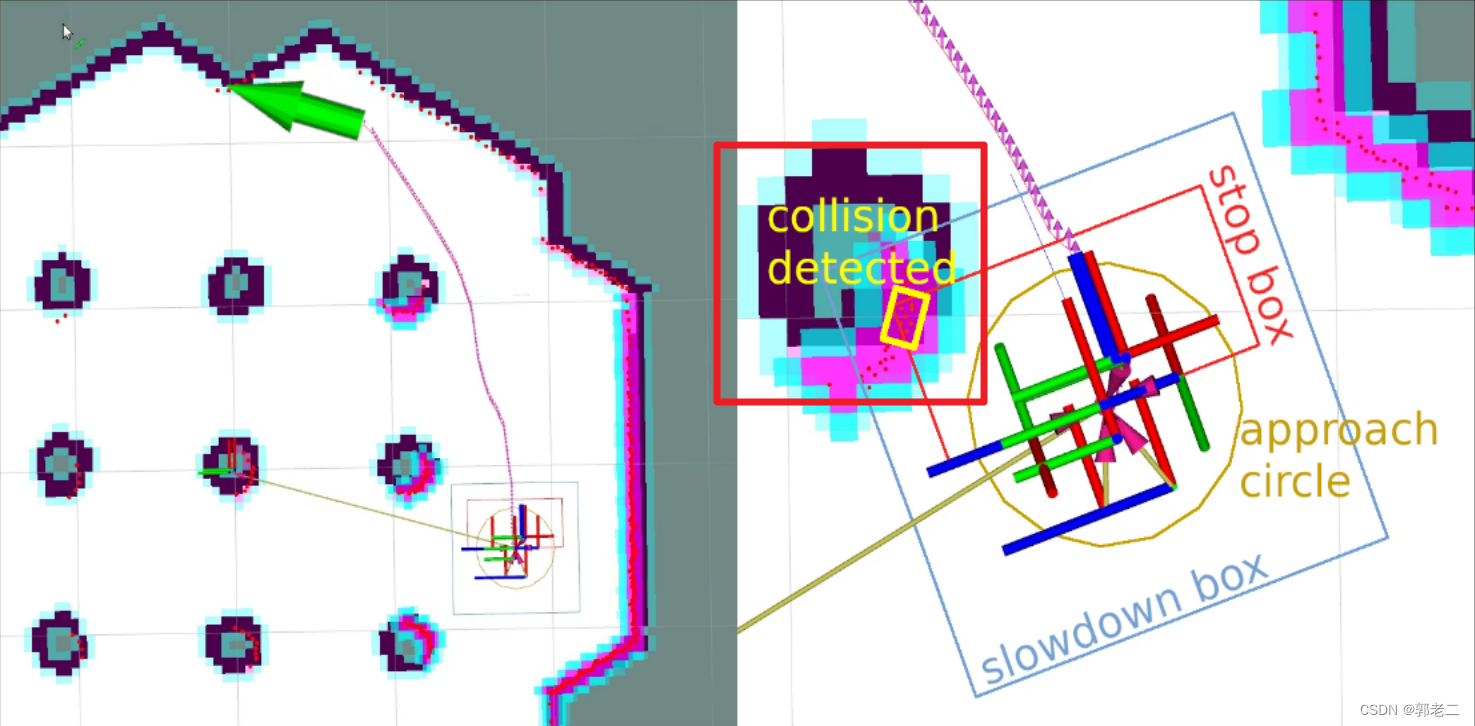
1、简介
nav2_collision_monitor碰撞监视器是一个节点,为机器人提供了一个额外的安全级别。
它使用来自传感器的数据,执行若干与避免碰撞相关的任务,绕过成本图和轨迹规划器,监测是否需要紧急停止或者减速。
2、安全行为
Collision Mon…
ROS中Rviz实时路径可视化的高效性能优化技巧
摘要
在ROS环境下使用Rviz时,随着时间的增加,通过Python可视化函数visualize_actual_path不断向Path消息中追加新的位置数据会导致处理和传输数据的时间显著增长,进而影响到rviz的刷新率和仿真流畅性。为了解决这一问题,本博客提…
ROS Noetic版本 rosdep找不到命令 不能使用的解决方法
使用rosdep指令来安装开源包所需的依赖是很方便的,本文主要介绍ROS Noetic版本中使用rosdep,报错找不到命令 ,rosdep不能使用的解决方法。 rosdep:找不到命令
Command rosdep not found, but can be installed with:sudo apt ins…
base_lcoal_planner的LocalPlannerUtil类中getLocalPlan函数详解
本文主要介绍base_lcoal_planner功能包中LocalPlannerUtil类的getLocalPlan函数,以及其调用的transformGlobalPlan函数、prunePlan函数的相关内容 一、getLocalPlan函数 getLocalPlan函数的源码如下:
bool LocalPlannerUtil::getLocalPlan(const geomet…
路径规划 | 图解LPA*算法(附ROS C++/Python/Matlab仿真)
目录0 专栏介绍1 什么是LPA*算法?2 LPA*算法核心概念一览3 LPA*算法流程4 步步图解:算法实例5 算法仿真与实现5.1 ROS C实现5.2 Python实现0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备࿰…
在ubuntu22.04中借助docker实现安装、调试ros1.0
一.安装docker
参考:https://www.cnblogs.com/cqpanda/p/16247919.html
使用安装方法1直接安装,没出问题,我就继续了。出问题按方法2安装吧。
curl -fsSL https://get.docker.com | bash -s docker --mirror Aliyun
二.docker中安装ros1.…
rangenet++运行 bonnetal训练 点云标签 记录
准备原始点云数据,为bin格式
安装point_labeler工具,根据readme步骤安装,并设定好格式进行标签
修改bonnetal的配准
安装semantic-kitti,查看点云标签content,并修改bonnetal上的设置
./content.py --dataset ~/da…
从零搭建一台基于ROS的自动驾驶车-----5.路径规划与导航
系列文章目录
北科天绘 16线3维激光雷达开发教程 基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图 Nvidia Jetson Nano学习笔记–串口通信 Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出 Autolabor ROS机器人教程 从零搭建一台基于ROS的自动驾驶车-----1.整体介…
超维空间S2无人机使用说明书——43、将雷达定位信息通过mavros传给飞控
引言:在实现三维雷达定位后,还需要将定位数据传给飞控,这样无人机才能实现切入定点模式。无人机在有了位置以后,才能实现精确的闭环控制
简介
采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度信…
基于Ubuntu20.04安装ROS系统
文章目录 一、ROS简介二、ROS安装三、ROS安装测试四、安装问题解决1. sudo rosdepc init:找不到命令2. ERROR: cannot download default sources list from...3. Command roscore not found...4. Resource not found: roslaunch... 一、ROS简介
ROS是用于编写机器人…
自动驾驶——Carla 模拟器简介
CARLA基本介绍
CARLA是一个开源的自动驾驶模拟器。它是从头开始构建的,用作模块化和灵活的API,以解决自动驾驶问题中涉及的一系列任务。 CARLA的主要目标之一是帮助自动驾驶研发民主化,它是一种易于用户使用和定制的工具。为此,模…
ROS导航——环境感知(激光雷达)
下载相关驱动包(激光雷达厂商应该会给出) 编译后可能会出现部分错误,以下是部分情况: (1) 移植功能包后出现c文件无法找到头文件的情况:解决链接 修改代码:(以我的雷达为…
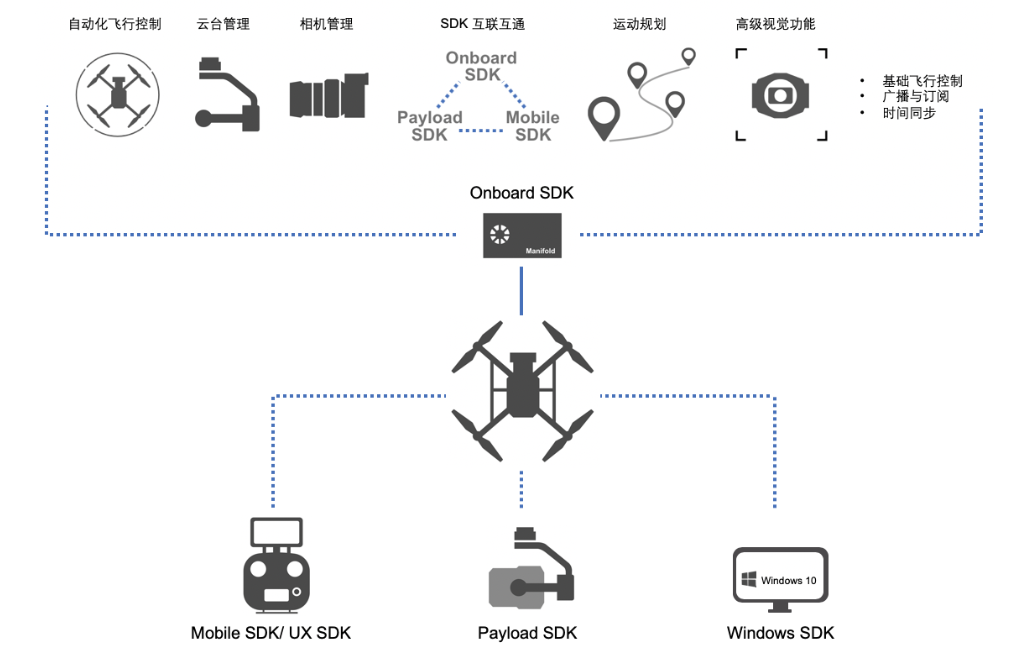
DJI ONBOARD SDK—— 基础控制功能 Joystick的讲解,使用和扩展
DJI ONBOARD SDK/DJI OSDK ROS—— 基础控制功能 Joystick的使用
概述
使用OSDK/OSDK_ROS 的无人机飞行控制功能,能够设置并获取无人机各项基础参数,控制无人机执行基础飞行动作,通过Joystick 功能控制无人机执行复杂的飞行动作。
Joystic…
七轴开源协作机械臂myArm视觉跟踪技术!
引言 ArUco标记是一种基于二维码的标记,可以被用于高效的场景识别和位置跟踪。这些标记的简单性和高效性使其成为机器视觉领域的理想选择,特别是在需要实时和高精度跟踪的场景中。结合机器学习和先进的图像处理技术,使用ArUco标记的机械臂系统…
ROS源码安装应用,VSCode
ROS源码安装应用 安装一下VSCode 前置文章 到安装程序的目录中: 完成克隆 编译 catkin_make打开ros核心
roscore打开应用程序
rosrun turtlesim turtlesim_node安装一下VSCode
deb下载地址
sudo dpkg -i code_1.84.1-1699275408_amd64.deb添加项目工程到工作空间ÿ…
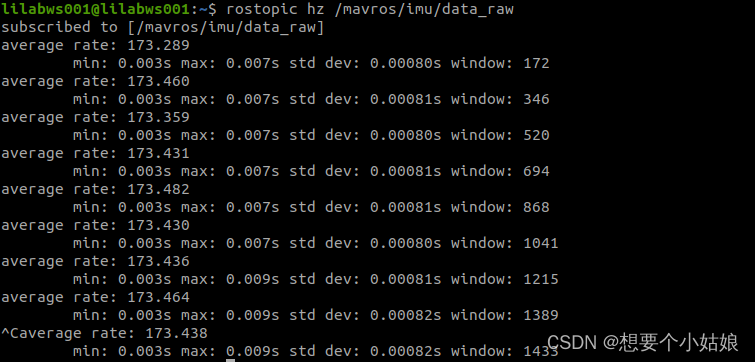
修改PX4飞控的imu频率
QGroundControl 连接上飞控后,打开 Analyze Tools 下的 MAVLink Inspector 界面 可以看到当前的 IMU 频率为50 HZ,或者在终端启动 mavros,终端输入
sudo chmod 777 /dev/ttyACM0
roslaunch mavros px4.launch
然后查看频率
rostopic hz /m…
学习SLAM:SLAM进阶(九)以激光点云赋色为例讲述如何自定义ROS的消息格式并实现消息的订阅与发布
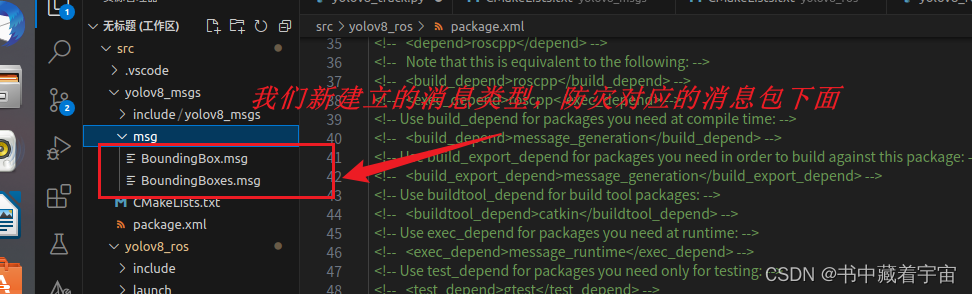
目录 1 为什么需要自定义的ROS消息格式
1.1 简介
1.2 ROS自定义消息格式的通用结构

超维空间S2无人机使用说明书——42、使用3维雷达进行室内定位——实物篇
引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位…
【SLAM】 前端-视觉里程计之特征点
前端-视觉里程计之特征点
参考资料: 以不变应万变:前端-视觉里程计之特征点 视觉SLAM——特征点法
task05 本次了解了特征点是由关键子和描述子组成,并且对比了SIFT、SURF等七种获取特征点的方法,同时对比了SIFT、SURF和ORB方法…
【ROS】Nav2源码之nav2_controller详解
1、简述
nav2_controller(Nav2控制器)是Nav2中的任务服务器。根据 nav2_planner 模块计算出路径规划(全局路径或局部路径),生成速度、方向控制的命令(说白了就是控制机器人沿着找到的路走)。
nav2_controller生成速度、方向控制的命令的方法可以有多种,因此它设计成插…
小秋SLAM入门实战ROS文章汇总
小秋SLAM入门实战教程汇总 【launch文件中如何启动gdb调试单个节点多个节点】 一个ros可执行程序可以定义几个节点? ros启动节点的launch文件你真的会写吗?
【Point Cloud ROS】用一张彩色图像和深度图像生成点云图像 【Point Cloud ROS】两张点云图像之…

ROS:ROS是什么
目录 一、ROS简介二、ROS可以做些什么三、ROS特征四、ROS特点4.1点对点设计4.2不依赖编程语言4.3精简与集成4.4便于测试4.5开源4.6强大的库与社区 五、ROS的发展六、ROS架构6.1OS层6.2中间层6.3应用层 七、通信机制八、计算图8.1节点(Node)8.2节点管理器…

ROS机器人毕业论文数量井喷-数据日期23年11月13日
背景
ROS机器人论文数量在近3年井喷发展,仅硕士论文知网数据库可查阅就已经达到2264篇,实际相关从业者远远远大于这个数值。 按日期排序,每页20篇,23年还未结束,检索本身也不一定完备,就超过200。 相关从业…
教你配置出和我一样的ros工作环境附上整个工作空间里的源码
程序员做梦都想做的事就是有一个搭建好的环境让你舒服地敲代码 Debug,所以对于想学ros跑起turtlebot的小伙伴我这边留下一份自己搭建起ubantu14.04下的环境的配置过程,以及最后给出了github上的源码(是robotcuphome 2017和2018一些比赛积累出…

RoboWare studio学习笔记
转至:http://www.zhimengzhe.com/bianchengjiaocheng/qitabiancheng/198333.html
我这里是参考了RoboWare的用户手册 创建工作区 小技巧 ctrl 可以将工作空间变大 ctrl - 可以将工作空间变小
工作空间 在这个过程遇到了git的版本问题不对,总是报警 创…
记录使用ROS驱动USB相机
参考https://blog.csdn.net/weixin_48657767/article/details/126054121?spm1001.2014.3001.5502cmake编译时有bug,缺包,安装对应的包sudo apt-get install ros-melodic(对应ros版本)-****(对应包名,下划线…
ROS JsonCPP 安装配置教程
以下是在ROS中安装配置JsonCPP的步骤:
在终端中输入以下命令来安装JsonCPP的依赖项:
sudo apt-get install cmake
sudo apt-get install libjsoncpp-dev创建一个新的ROS工作空间(如果你已经有一个工作空间,请跳过此步骤…

最快实现一个自己的扫地机
作者:良知犹存
转载授权以及围观:欢迎关注微信公众号:羽林君
或者添加作者个人微信:become_me 扫地机介绍
扫地机器人行业本质是技术驱动型行业,产品围绕导航系统的升级成为行业发展的主旋律。按功能划分&a…
【ROS使用RealSense-D435i,RealSense-ROS】
一. 运行D435i深度摄像头
https://www.intelrealsense.com/get-started-depth-camera/
请访问 GitHub 上的 Linux* 发行版页面以获取安装说明。
安装软件包:https://github.com/IntelRealSense/librealsense/blob/development/doc/distribution_linux.md#install…
踩坑之旅:配置 ROS 环境
以下内容为本人的著作,如需要转载,请声明原文链接 微信公众号「englyf」https://mp.weixin.qq.com/s/IS2lkMud7x_u0aZKar9z3w
最近在学习机器人相关的导航算法,为了方便于验证算法的效果,需要搭一个 ROS(Robot Operate System) 环…
MATLAB - 读取双摆上的 IMU 数据
系列文章目录 前言
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody™ 进行建模。有关使用 Simscape Multibody™ 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)…

整个自动驾驶小车001:概述
材料:
1,树梅派4b,作为主控,这个东西有linux系统,方便
2,HC-S104超声波模块,我有多个,不少于4个,我可以前后左右四个方向都搞一个 3,l298n模块,…

TinyMPC - CMU (卡耐基梅隆大学)开源的机器人 MPC 控制器
系列文章目录
CasADi - 最优控制开源 Python/MATLAB 库 文章目录 系列文章目录前言一、机器人硬件对比1.1 Teensy 上的微控制器基准测试1.2 机器人硬件1.3 BibTeX 二、求解器三、功能(预期)3.1 高效3.2 鲁棒3.3 可嵌入式3.4 最小依赖性3.5 高效热启动3.…
MATLAB - 读取双摆杆上的 IMU 数据
系列文章目录 前言
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody™ 进行建模。有关使用 Simscape Multibody™ 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)…

【Ubuntu20.04】ROS noetic的g2o与系统g2o冲突问题
文章目录 0.问题描述1.问题原因2.解决方法2.1.方法12.1.方法2 3.成功效果 0.问题描述 \qquad 从github安装2023版本的g2o时,若ROS也安装了g2o,则会在编译时触发运行时冲突。具体表现为段错误,如若需要排查是否为ROS的g2o导致,则需…
掌握ROS:完整的认识ROS
目录
前景知识补充
什么是元操作系统?
高层决策
高层决策的特点
什么是ROS?
ROS的框架
1. 通信机制
系统工具
开发框架
ROS的开发流程
ROS的应用场景 前景知识补充
什么是元操作系统?
元操作系统(Meta-Operating Sys…
CMake入门实战 (番外篇)——ROS/CMakeLists.txt书写规则
ROS/CMakeLists.txt书写规则1. 概述2. 所有结构和指令3. CMake版本4. 功能包(项目)名称5. 查找依赖的CMake包5.1 find_package()做了什么工作5.2 为什么Catkin Packages被声明Components5.3 Boost6. catkin_package()7. 指定构建对象7.1 目标命名7.2 自定义输出目录7.3 包含路径…
使用VsCode进行ROS程序调试
使用VsCode进行ROS程序调试安装相关插件创建调试配置文件启动调试安装相关插件
首先在VsCode中安装相关插件 最重要是安装ROS插件,请注意是微软发布的版本
创建调试配置文件
点开ROS插件的页面 到工具栏中的点击“运行与调试”页面,如下图…
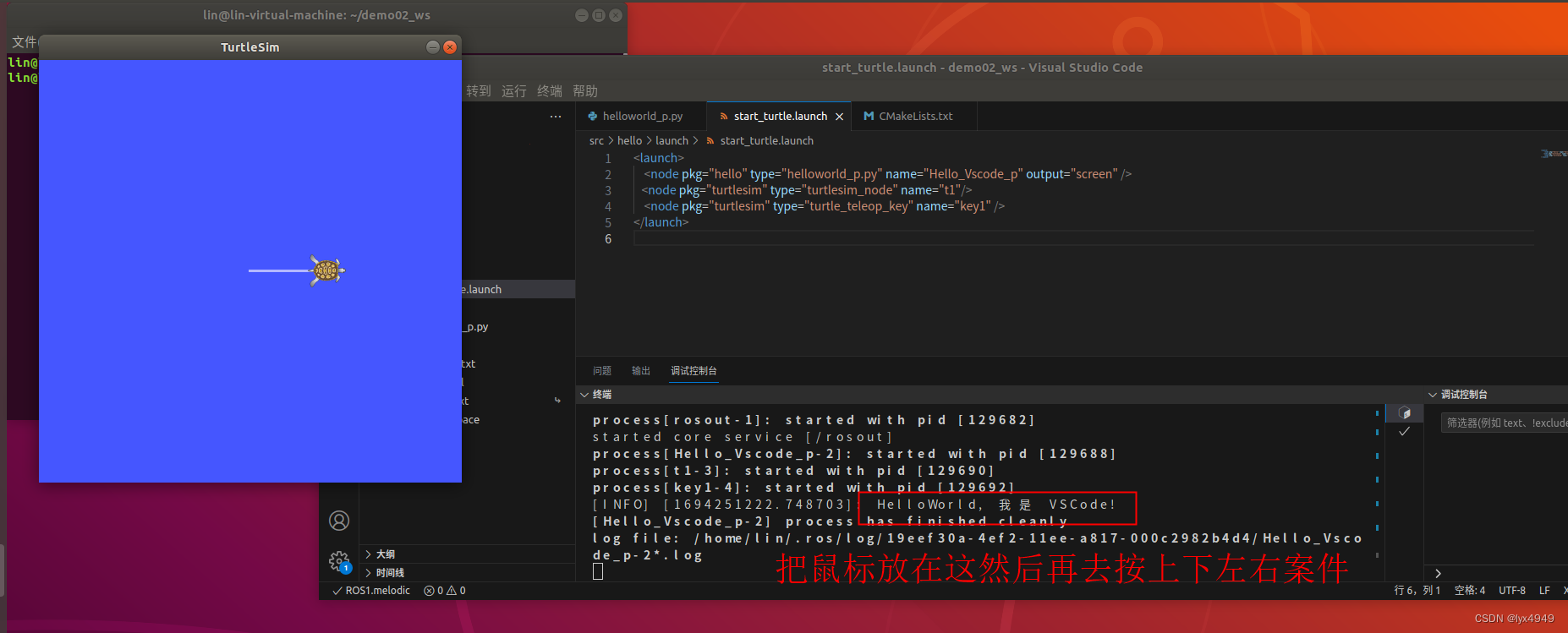
ROS学习笔记(四)---使用 VScode 启动launch文件运行多个节点
ROS学习笔记文章目录
01. ROS学习笔记(一)—Linux安装VScode 02. ROS学习笔记(二)—使用 VScode 开发 ROS 的Python程序(简例) 03. ROS学习笔记(三)—好用的终端Terminator 一、什么是launch文件 虽然说Terminator终端是能够比较方便直观的看运行的节点…
乐视三合一体感深度相机AstraPro图像获取流程【必看】
1、下载ros包或者自己去github 如果不能科学上网,可以在这里下载所有源代码。 下载链接:https://download.csdn.net/download/ryanji/87990936
git clone https://github.com/orbbec/ros_astra_camera.git
git clone https://github.com/libuvc/libuvc.…
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试
本文包含vscode下环境包括调试环境的搭建、节点或launch文件运行、单节点调试、多节点/launch文件(roslaunch)调试,及各个过程中最常见的问题及解决方法。
1. 相关插件安装
ROS插件。C配置:安装c/c 及 C Intellisense 这两个插件…
在ros中利用串口serial发布fdilink的gps话题
文章目录 介绍FDILink通讯协议数据帧组成数据包 数据处理打开串口在头文件中定义参数串口读取 代码运用依赖:使用: 源码 介绍
DETA100系列 是一个提供 GNSS/INS & AHRS 系统的模组,在最苛刻的条件下提供准确的位置、速度、加速度和姿态数…

ROS话题(Topic)通信:通信模型、Hello World与拓展
文章目录 一、话题通讯模型二、Topic Hello World2.1 创建并初始化功能包2.2 确定Topic名称及消息格式2.3 实现发布者与订阅者(C版)2.4 实现发布者与订阅者(Python版)2.5 关于Topic Hello World的注意 拓展1:devel下其…
linux下配置vscode中的ros的c++调试
第一步 这块是launch.json {"version": "0.2.0","configurations": [{"name": "g - 生成和调试活动文件","type": "cppdbg","request": "launch","program": "${wo…
mavros黑白名单设置
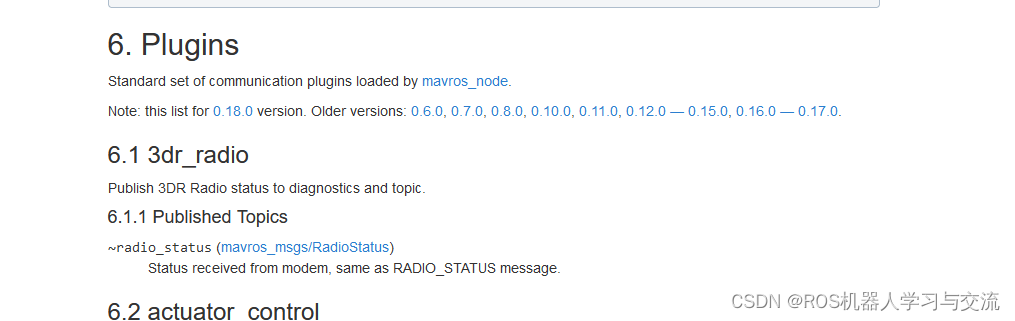
链接: mavros设置黑白名单
设置mavros黑白名单主要是通过插件的参数进行设置,如下:
这里是在px4_pluginlists.yaml参数文件中设置 plugin_blacklist:
# common
- safety_area
- 3dr_radio
- actuator_control
- hil_controls
- ftp
- global_position
…
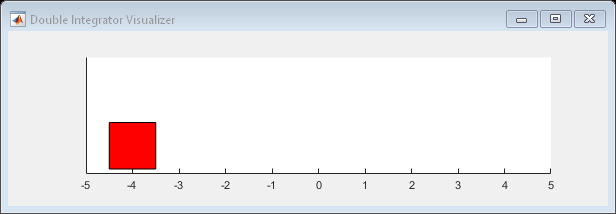
MATLAB - 控制小车上的倒立摆
系列文章目录 前言 一、小车 - 摆杆
小车 - 摆杆模型如图 1 所示,使用 Simscape™ Multibody™ 在 Simulink 中建模。 图 1:小车上的倒立摆 图 2:Simscape 多体模型 该系统通过对小车施加可变力 进行控制。控制器需要在将小车移动到新位置或…
ROS采用vector动态传递数组参数
ROS采用vector动态传递数组参数
链接: vector的初始化_C的vector使用方法
链接: C vector的初始化
链接: c vector 初始化_C-vector()的用法
链接: link
链接: ros自定义动态消息发布(vector)
链接: ros&c遇到的坑(vector 引起segmentation fault )
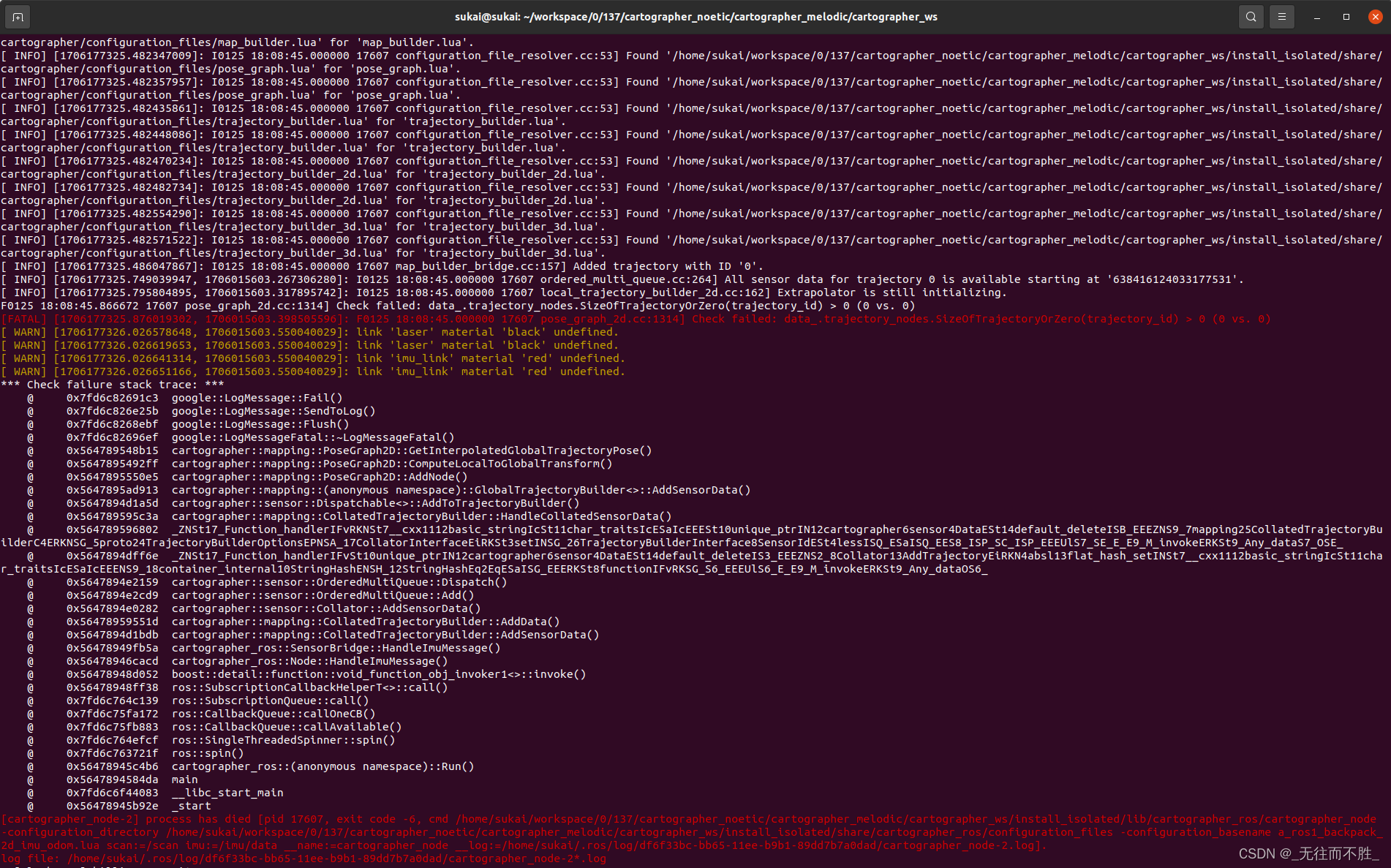
cartographer离线建图报错:data_.trajectory_nodes.SizeOfTrajectoryOrZero
cartographer离线建图报错: data_.trajectory_nodes.SizeOfTrajectoryOrZero [FATAL] [1706177325.876019302, 1706015603.398505596]: F0125 18:08:45.000000 17607 pose_graph_2d.cc:1314] Check failed: data_.trajectory_nodes.SizeOfTrajectoryOrZero(trajectory_id) &…
0开始配置Cartographer建图和导航定位
0开始配置Cartographer
日期:12-19 硬件:激光雷达IMU
小车的tf变换: 建图配置
lua文件配置:my_robot.lua include "map_builder.lua"
include "trajectory_builder.lua"options {map_builder MAP_BUILDE…
moveit 2源码编译
文章目录前言下载编译过程创建开发环境拉取源代码更新rosdep下载安装moveit 2依赖包编译源码输出结果总结前言
本文用来记录moveit 2从源码编译的全流程。 本机环境: 系统:debian 11 ros版本:ros2 humble 处理器:intel i7 内存&a…

ROS学习——通信机制(话题通信①—发布方实现)
2.1 话题通信 Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
040话题通信(C)1_发布方框架_Chapter2-ROS通信机制_哔哩哔哩_bilibili
一、ROS 中的基本通信机制主要有如下三种实现策略
话题通信(发布订阅模式服务通信(请求响应模式)参数服务器(参数共享模式) 二、…
Caught exception in launch(see debug for traceback)
Caught exception in launch (see debug for traceback): Caught exception when trying to load file of format [xml]: Caught exception when trying to load file of format [xml]: junk after document element: line 8, column 9 罪魁祸首: 看吧我在launch文件…
Ros开发的第一个程序
工程创建
创建并进入catkin文件夹
wilsonubuntu:~/code$ mkdir catkin
wilsonubuntu:~/code$ cd catkin/创建并进入src文件夹
wilsonubuntu:~/code/catkin$ mkdir src
wilsonubuntu:~/code/catkin$ cd src/
wilsonubuntu:~/code/catkin/src$ 在src目录下初始化工作空间
wil…
ROS基础—vscode创建工作空间
1、创建ROS工作空间
首先打开ubuntu的终端,接着依次输入如下的命令行;
mkdir -p xxx_ws/src(必须得有 src)
cd xxx_ws
catkin_make当然我一般是新建一个叫做demo的工作空间,如 mkdir -p demo04_ws/src
2、启动vscode
cd xxx_ws
code .
…
ROS2串口通讯serial库(适用于humble版本)
要的串口操作的API介绍在这里:serial: serial::Serial Class Reference (wjwwood.io) 但是我们不是直接利用上面这个东西,而是使用的是根据这个改写的一个针对ros2的一个serial库,这个serial库是根据上面这个库改写来的,ros2的库在…
ubuntu18.04下的opencv卸载与安装
一、opencv卸载
1、查看opencv版本号、安装路径
查看版本号
pkg-config --modversion opencv 查看安装路径
sudo find / -name opencv.pc这是安装的路径: /usr/lib/x86_64-linux-gnu/pkgconfig/opencv.pc cat /usr/lib/x86_64-linux-gnu/pkgconfig/opencv.pc文…
ROS第 6 课 编写简单的订阅器 Subscriber
文章目录 第 6 课 编写简单的订阅器 Subscriber1. 编写订阅者节点2. 测试发布者和订阅者 第 6 课 编写简单的订阅器 Subscriber 订阅器是基于编辑了发布器的基础上创建的,只有发布了消息,才有可能订阅。若未编辑发布器,可前往"ROS第5课 …
(四)ros中ros::init(argc,argv,”节点名称”)。中的节点名称和launch文件中的节点名称关系。
1、使用rosrun 命令执行ros程序:
Rosrun <功能包名称> <节点名称>。其中”节点名称”为ros::init中的ros节点名称。
2、使用launch 文件 name 参数为ros节点名称。
如果采样launch启动ros程序,launch文件中的ros节点名称会替换ros::init中的节点名称…
类的成员函数作为ROS的回调函数
ROS 开发人员提供了一个简洁的替代 subscribe 方法,它接受成员函数和相应的对象,如下所示:
sub n.subscribe("/camera/depth_registered/points", 1000, &Example::callBack, this);&Example::callBack 是指向成员函数的…
ROS初始化rosdep问题的解决 /rosdep update 时出现错误
1 ROS初始化rosdep问题的解决
ROS初始化rosdep问题的解决_巴斯克维尔的博客-CSDN博客_初始化rosdep
2 rosdep update 时出现错误
这个错误多数是因为网络造成的,多试几次,如果还不行换个好点的无线网或者手机热点
ROS- 解决 rosdep update 出现的错误…
超维空间S2无人机使用说明书——41、使用3维雷达进行室内定位——仿真篇(跑数据集)
引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位…
超维空间S2无人机使用说明书——31、使用yolov8进行目标识别
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,以及yolov7。
简介,为了提高识别速度,系统采用了G…
【ROS】ROS2-humble安装navigation2与使用
Part 0. 准备
安装gazebo sudo apt install ros-humble-gazebo-* 测试gazebo: ros2 launch gazebo_ros gazebo.launch.py
Part 1. [安装] 直接安装Navigation2
下载与安装:
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-na…
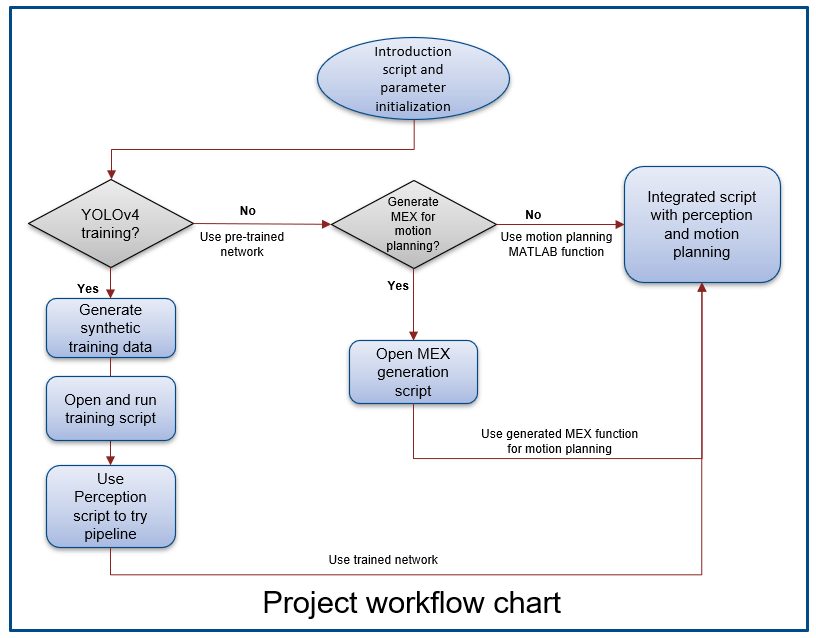
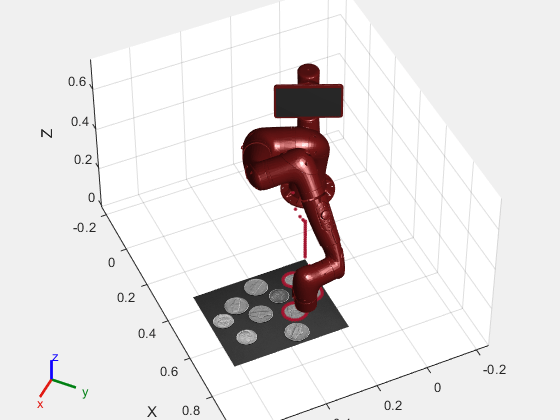
MATLAB - 使用 YOLO 和基于 PCA 的目标检测,对 UR5e 的半结构化智能垃圾箱拣选进行 Gazebo 仿真
系列文章目录 前言
本示例展示了在 Gazebo 中使用 Universal Robots UR5e cobot 模拟智能垃圾桶拣选的详细工作流程。本示例提供的 MATLAB 项目包括初始化、数据生成、感知、运动规划和积分器模块(项目文件夹),可创建完整的垃圾桶拣选工作流…
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录 前言 一、简介
通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以
从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆…

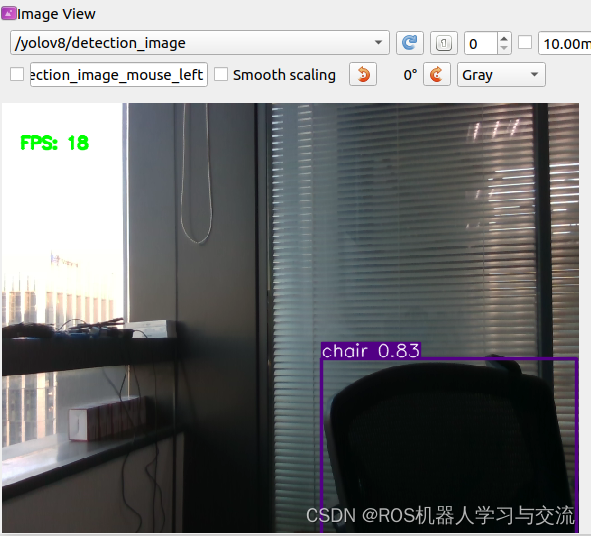
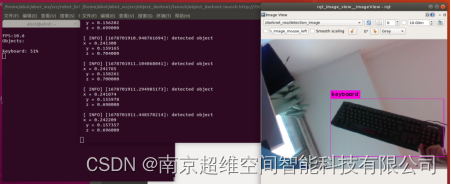
ros使用rviz订阅Image类型话题,显示yolov7目标检测结果
开发板深度相机系统Xavierrealsense D455ubuntu18.04
1、首先启动yolov7的ros节点,发布话题/image。 2、终端输入rviz,回车打开rviz,Add——>Image: 3、展开Image选项,选择要订阅的topic,左下角就显示出…
从零开始的机械臂yolov5抓取gazebo仿真(四)
Moveit与Gazebo联合仿真
上一篇博客已经将moveit!配置完毕,然而想要让moveit!控制gazebo中的机械臂,还需要进行一些接口的配置。现在我们有的功能包为sunday_description、sunday_moveit_config这两个功能包。且已经配置好xacro文件,本篇内容…
ros2机器人在gazebo中移动方案
原文连接Gazebo - Docs: Moving the robot (gazebosim.org) 很重要的地方:使用虚拟机运行Ubuntu的时候,需要关闭”加速3D图形“的那个选项,否则gazebo无法正常显示。
Moving the robot(使用命令移动机器人示例)
In t…
ROS参数服务器——参数操作(python)
目录 一、参数服务器的新增、修改参数
1、API
2、代码
二、参数服务器获取参数
1、API
2、代码
三、参数服务器删除参数
1、API
2、代码 一、参数服务器的新增、修改参数
1、API
参数服务器操作之新增与修改(二者API一样)_Python实现
2、代码
import rospyif __nam…
【自主探索】基于 rrt_exploration 的单个机器人自主探索建图
文章目录 一、rrt_exploration 介绍1、原理2、主要思想3、拟解决的问题4、优缺点 二、安装环境三、安装与运行1、安装2、运行 四、配置说明1、Robots Network2、Robots frame names in tf3、Robots node and topic names4、Setting up the navigation stack on the robots5、A …
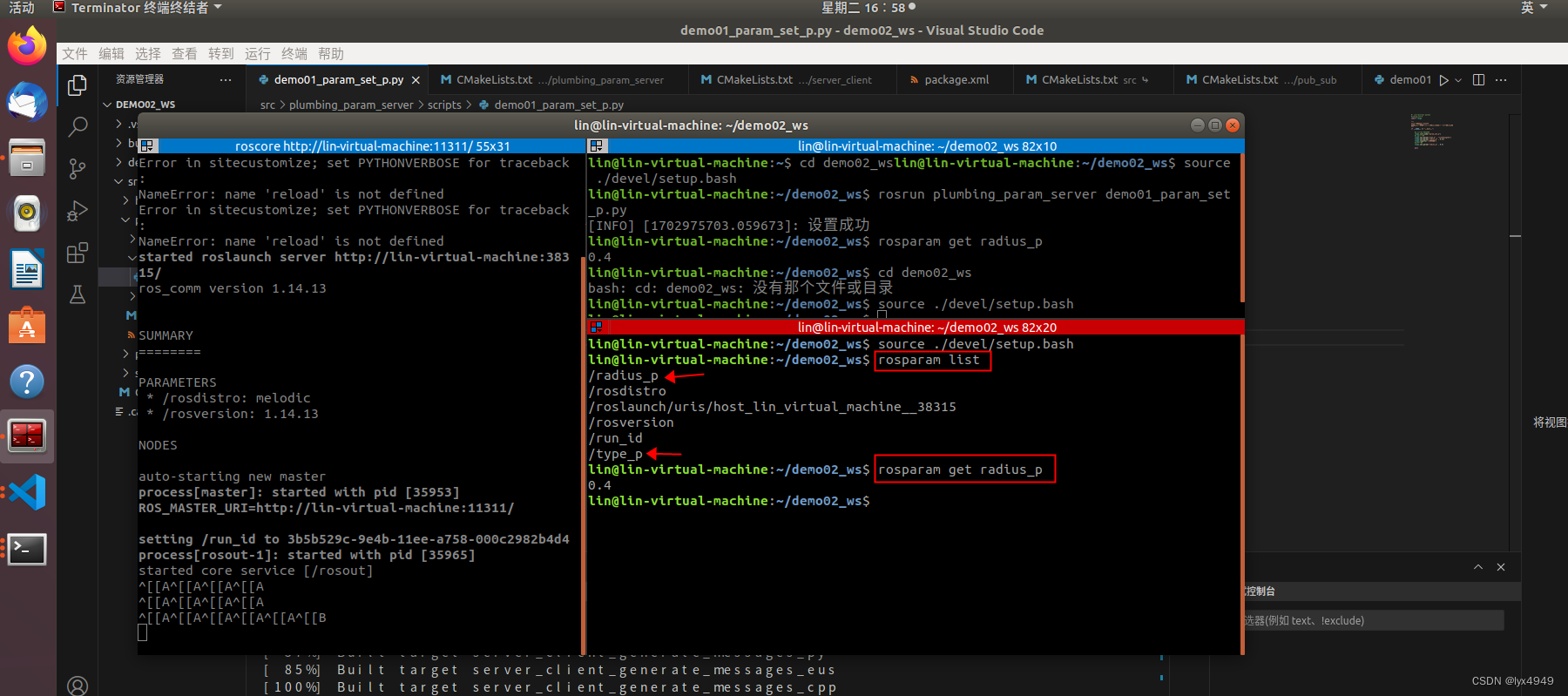
ROS-2.ros工具简单认识
ROS命令工具
ros提供了丰富的命令行工具
命令作用rostopic主题相关工具rosservicerosnode节点相关工具rosparam参数相关工具rosmsg消息相关工具rossrv$1
运行小海龟
开启一个终端,启动ros master
roscore开启一个终端,启动小海龟仿真器
rosrun tur…
MATLAB - 使用 TOPP-RA 求解器生成带约束条件的时间最优轨迹
系列文章目录 前言
本例演示如何生成满足速度和加速度限制的轨迹。该示例使用了 contopptraj 函数,该函数使用可达性分析 (RA) 求解受约束的时间最优路径参数化 (TOPP) 轨迹。 一、示例背景
本例解决的是 TOPP 问题,这是一个机器人问题,其目…
ROS机器人启动move base时代价地图概率性无法加载的原因及解决方法
最近,使用ROS机器人,在启动move_base 节点时,概率性会出现全局和局部代价地图不加载的问题,此时,发布目标点也无法启动路径规划。而且该问题有时候出现概率很低,比如启动10次,会有1次发送该情况…
MATLAB - 凸优化(Convex Optimization)
系列文章目录 前言 凸优化(Convex optimization)是在凸约束(convex constraints)条件下使凸目标函数(convex objective function)最小化的过程,或者等同于在凸约束条件下使凹目标函数最大化的过…
ROS-1.安装ROS
安装ROS os在ubuntu18中安装ros1.安装1.1 ubuntu18 配置阿里源1.2 设置sources.list1.4 安装1.5 初始化 rosdep报错1 sudo: rosdep:找不到命令报错2 ERROR: cannot download default sources 1.6 设置环境变量1.7 安装依赖项 测试 os
系统:ubuntu18.04 …
Pinocchio - 开源多刚体动力学 C++、Python库
系列文章目录 前言
Pinocchio 是一个用于动态计算的 C 库,侧重于机器人、计算机动画和生物力学应用。 它基于 Featherstone 在其著作中正式提出的动态多体计算。 该软件附带一个 python 封装和可视化工具。 一、库特征
实现了以下算法
递归牛顿-欧拉算法…
MATLAB - 比较 DDPG Agent 和 LQR 控制器
系列文章目录 前言
本示例展示了如何训练深度确定性策略梯度(DDPG)Agent,以控制 MATLAB 中建模的二阶线性动态系统。该示例还将 DDPG Agent 与 LQR 控制器进行了比较。
有关 DDPG 代理的更多信息,请参阅深度确定性策略梯度 (DDP…
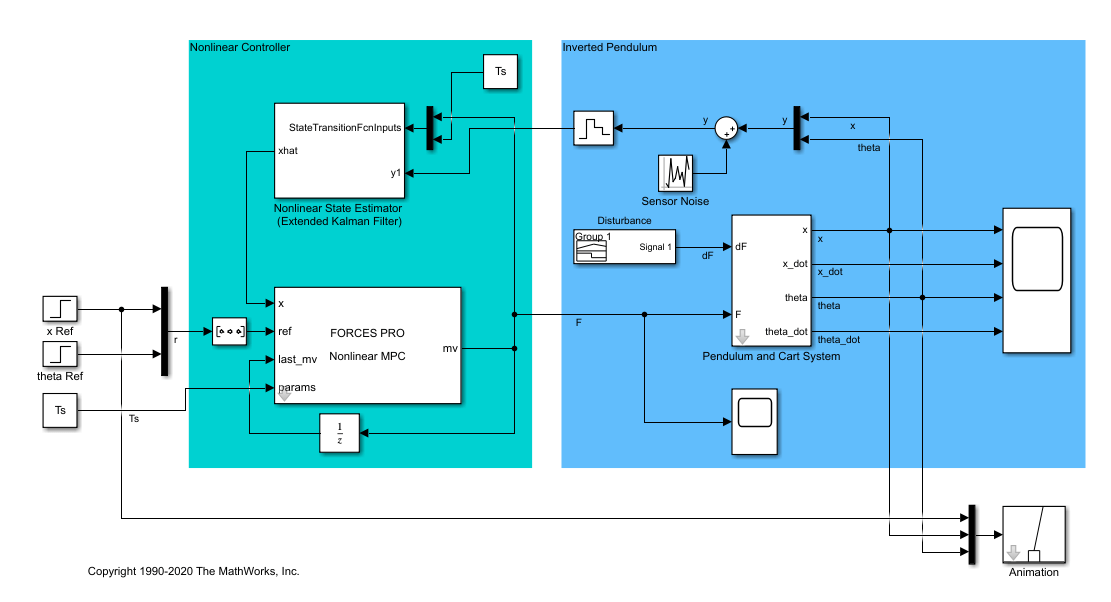
一级倒立摆控制 - 非线性 MPC 控制及 MATLAB 实现
系列文章目录 前言
本示例使用非线性模型预测控制器对象和块实现对小车上倒立摆的摆动和平衡控制。
本示例需要 Optimization Toolbox™ 软件为非线性 MPC 提供默认的非线性编程求解器,以计算每个控制间隔的最优控制动作。 一、摆锤/小车装配
本例中的被控对象是…
ros 接收相机数据数据并发布
完整这个任务不需要用到python3
效果如下所示
环境
ROS1 python2.7 原始环境 无conda 或者conda deactivate 无conda 状态 pip install rospkg pip install -i https://pypi.tuna.tsinghua.edu.cn/simple opencv-python4.2.0.3 代码 放在工程目录中
#!/usr/bin/env …
MATLAB - 最优控制(Optimal Control)
系列文章目录 前言 - 什么是最优控制? 最优控制是动态系统满足设计目标的条件。最优控制是通过执行以下定义的最优性标准的控制律来实现的。一些广泛使用的最优控制方法有: 线性二次调节器 (LQR)/线性二次高斯 (LQG) 控制 模型预测控制 强化学习 极值…

ROS从入门到精通5-5:局部路径规划插件开发案例(以DWA算法为例)
目录0 专栏介绍1 局部规划插件制作框架2 DWA算法源码分析2.1 全局路径裁剪2.2 更新局部代价2.3 运行DWA算法2.3.1 构造动态窗口2.3.2 生成最优轨迹2.4 终点规划3 算法测试0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机…
IEEE RAS 机器人最优控制(Model-based Optimization for Robotics)学习资料
系列文章目录 前言
电气和电子工程师学会机器人模型优化技术委员会 一、学习资料
1.1 教程和暑期学校
2020 年 Memmo 欧盟项目暑期班2019年Memmo欧盟项目冬季学校Matthias Gerdts(德国慕尼黑联邦国防军大学)在拜罗伊特 OMPC 2013 上举办的最优控制教程…
DRAKE - 基于模型的机器人设计与验证 由丰田研究所支持的 C++ / Python 工具箱。
系列文章目录 前言 - 概述 Drake(中古英语中的 "龙")是一个 C 工具箱,由麻省理工学院计算机科学与人工智能实验室(CSAIL)的机器人运动小组开发。目前,开发团队已大幅壮大,核心开发工作…

ROS学习记录2018.7.10
ROS学习记录2018.7.10
1.ROS基础了解
开源机器人操作系统ROS(robot operation system)
分级:
1.计算图集(一种网络结构) 1.节点:执行运算的进程(做基础处理的单元)2.消息&#x…
ROS笔记一:工作空间和功能包
目录
工作空间
如何创建工作空间: 编译工作空间 设置环境变量 功能包 创建功能包
CMakeLists.txt package.xml 工作空间
ROS的工作空间是用来存放工程文件代码的文件夹
ROS的开发依赖于工作空间,包括编写代码、编译等都是在工作空间下进行的
工作空…
Crocoddyl: 多接触最优控制的高效多功能框架
系列文章目录 前言 我们介绍了 Crocoddyl(Contact RObot COntrol by Differential DYnamic Library),这是一个专为高效多触点优化控制(multi-contact optimal control)而定制的开源框架。Crocoddyl 可高效计算给定预定…
ubuntu中安装autogpt,python虚拟环境安装使用
ubuntu中安装autogpt,python虚拟环境安装使用 git安装
https://gitforwindows.org
python3.10安装:
autogpt支持python版本是3.10,ubuntu20.04中默认版本3.8是不支持的。
安装虚拟环境
sudo add-apt-repository ppa:deadsnakes/ppa
sudo…
详解使用ament_cmake构建ROS2功能包
ROS2的构建系统叫做ament_cmake,它是基于CMake改进而来的。接下来将详细介绍一下ament_cmake常用的一些命令:
ament_target_dependencies:添加重要的头文件、库以及相关依赖ament_export_dependencies:导出依赖给下游的功能包&am…
ROS笔记四:ROS通信
简要介绍一下ROS的通信
确保你已经在ROS系统中安装了serial软件包。 如果没有安装,可以通过以下命令进行安装:sudo apt-get install ros-<distro>-serial 请将<distro>替换为你正在使用的ROS发行版名称,例如melodic、noetic等…
ROS自定义消息类型与使用
1、创建消息文件
在功能包中创建msg文件夹并在文件夹中创建消息文件exmsage.msg
Header header
int32 demo_int
float64 demo_double2、修改package.xml <build_depend>roscpp</build_depend><build_depend>std_msgs</build_depend><build_depend…

解决rosdep init,rosdep update遇到的问题
1、查看raw.githubusercontent.com的ip地址
可以在Hostname Summary查看raw.githubusercontent.com的ip地址.如图
2、配置host文件
sudo gedit /etc/hosts加入
185.199.110.133 raw.githubusercontent.com
185.199.110.133 raw.github.com以上步鄹可以解决如下问题
ERRO…
【ROS】URDF:统一机器人描述格式(XML)
1、简述
统一机器人描述格式(URDF)是描述机器人模型的 XML 文件,支持Xacro(XML宏),使用Xacro来引用已经存在的XML块,创建更短且可读的XML文件。
2、初始URDF描述文件
URDF描述文件为XML格式&…

ROS从入门到精通8-2:构造动态多行人可视化仿真环境
目录0 专栏介绍1 社会性导航2 动态多行人环境3 代码实现3.1 Gazebo可视化插件3.2 Rviz可视化插件3.3 环境效果0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。
&…
使用ros_arduino_bridge控制机器人底盘
使用ros_arduino_bridge控制机器人底盘 搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下:
系统准备;下载程序;程序修改;分别启动PC与树莓派…

ROS从入门到精通4-1:Docker安装与常用命令总结
目录 0 专栏介绍1 Docker与机器人应用2 Docker安装步骤3 Docker常用命令3.1 创建与启动容器3.2 暂停与删除容器3.3 容器文件拷贝3.4 构建镜像与上下文 0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进…
ROS小练习——话题订阅
目录
一、话题与消息获取
二、代码编写
1、C
2、python
三、编译运行 一、话题与消息获取
rostopic list rostopic type /turtle1/pose rosmsg info turtlesim/Pose 二、代码编写
1、C
//包含头文件
#include "ros/ros.h"
#include "turtlesim/Pose…
ROS1学习笔记:常用可视化工具的使用(ubuntu20.04)
参考B站古月居ROS入门21讲:常用可视化工具的实现 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录 一、日志输出工具:rqt_console二、绘制数据曲线:rqt_plot三、 图像渲染工具:rqt_image_view四、图形界面总接口:r…
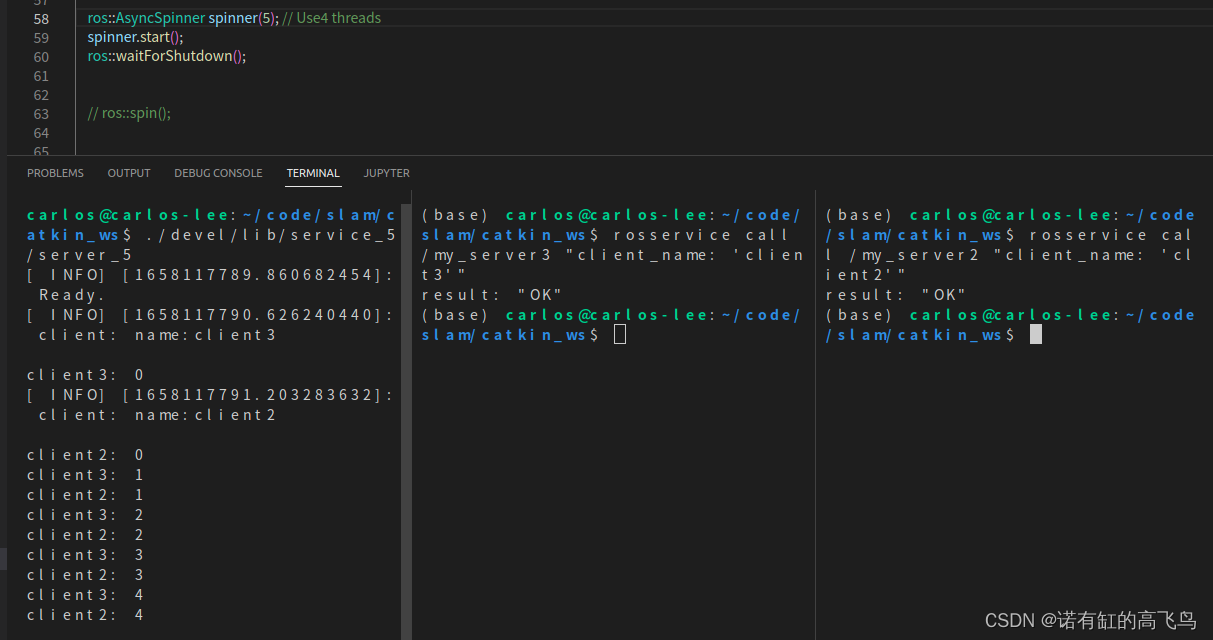
ros多客户端请求服务
目录写在前面代码使用参考写在前面
1、本文内容 一个节点的多个服务被请求时产生消息阻塞,使用多线程来解决 2、平台 ubuntu1804, ros melodic 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/125846107
代码
Service.srv
s…


超维空间M1无人机使用说明书——41、ROS无人机使用yolo进行物体识别
引言:用于M1无人机使用的18.04系统,采用的opencv3.4.5版本,因此M1无人机只提供了基于yolov3和yolov4版本的darknet_ros功能包进行物体识别,识别效果足够满足日常的物体识别使用,如果需要更高版本的yolov7或者yolov8&am…
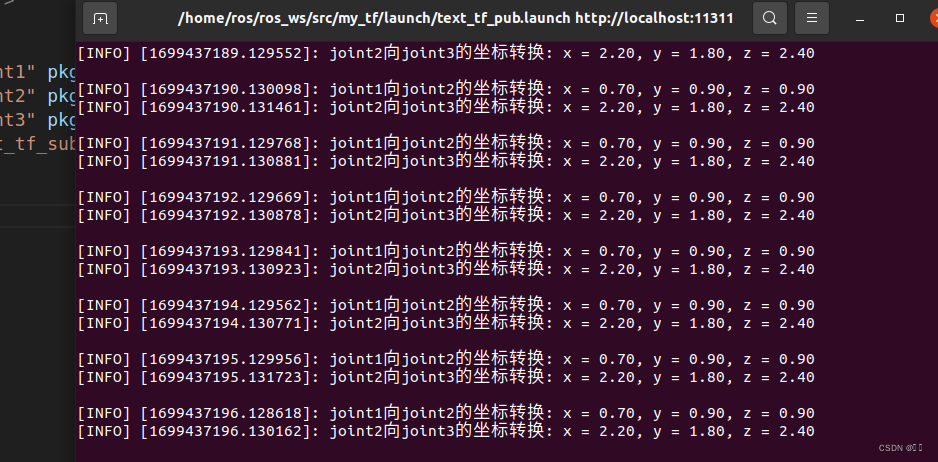
ROS 多级tf坐标转换
题目
现有一移动机器人,该机器人的基坐标系为“base_link”,机器人包含3个子坐标系分别为“joint1”,“joint2”,“joint3”。
要求:利用多坐标转换,实现joint1下的坐标向joint2下的坐标转换,…

ROS分布式控制的主从机配置及测试
ROS分布式控制的主从机配置及测试问题概述配置免密登录在dog配置ssh将dog的公钥拷贝到kyle主从机配置问题概述
我们的机器人经常结构比较特殊,不方便也不适合载一个显示器到处走,但是我们使用ROS开发时往往需要用RVIZ做一些可视化的调试操作,…
docker容器中安装ROS1/ROS2(不用配任何环境,10分钟搞定)
默认电脑已经安装了docker,没安装看这篇文章Docker 安装 (完整详细版)
在OSRF中拉取想要的 ROS 版本 docker 镜像 网址为 拉取命令在这里 我是安装noetic版本,因为这个兼容比较多现有的工程
docker pull osrf/ros:noetic-desktop-full拉取完后创建容器…
【ROS】参数服务器--理论模型与参数操作(C++)
一、概念介绍
参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
作用:存储一些多节点…
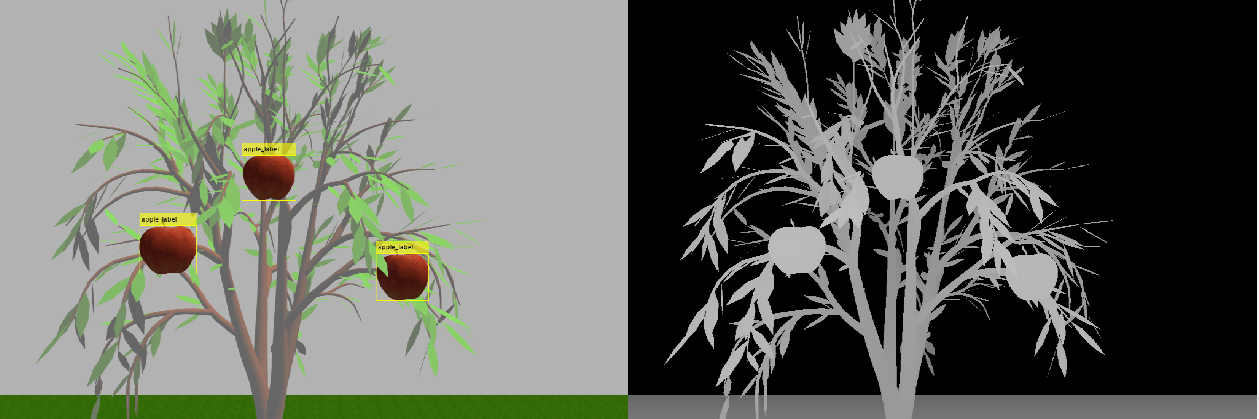
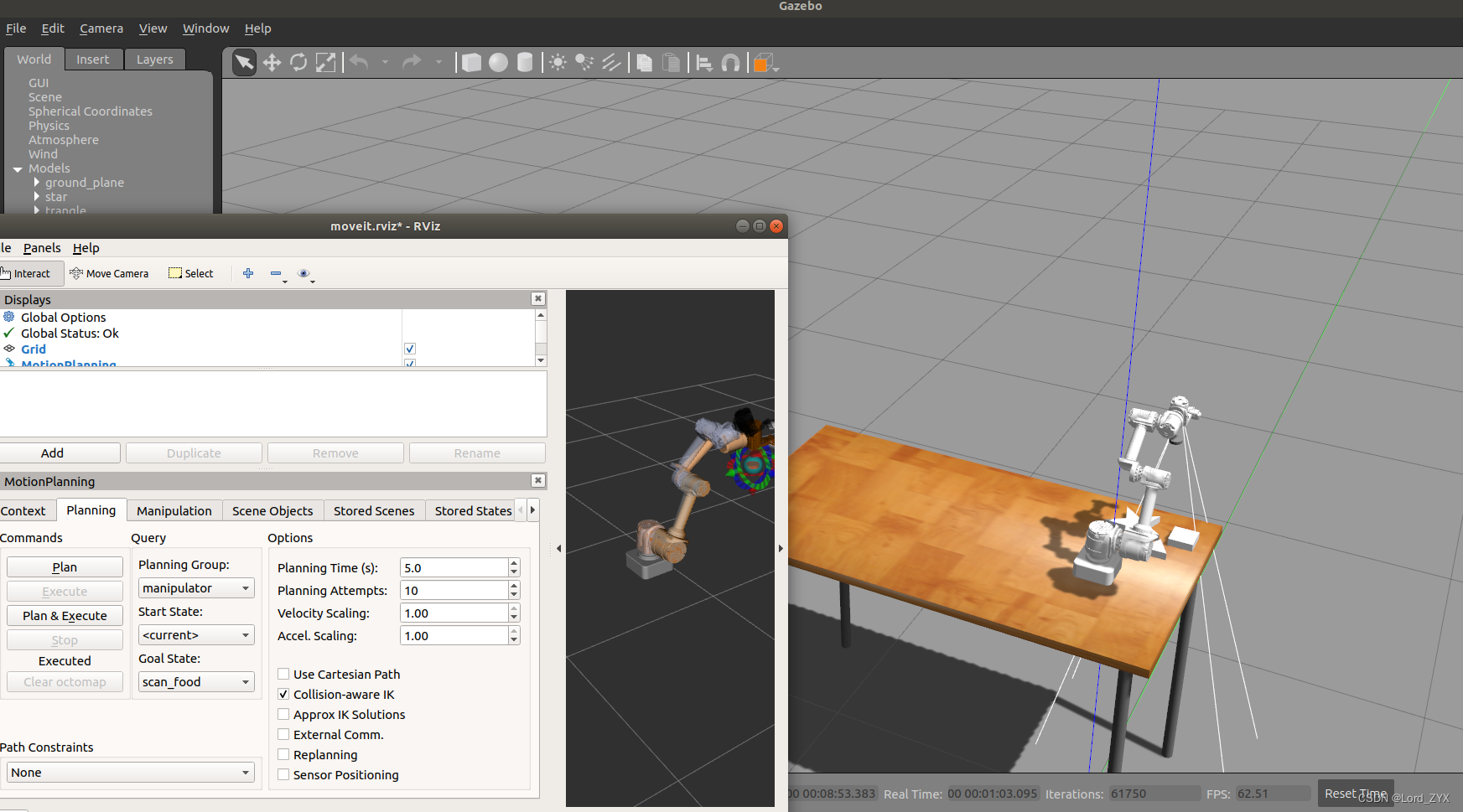
MATLAB - Gazebo 联合仿真 —— 使用 UR10 机械臂检测和采摘水果
系列文章目录 文章目录 系列文章目录前言一、设置 Gazebo 仿真环境二、在 Gazebo 中模拟和控制机器人2.1 概述2.2 任务调度器2.3 感知和目标生成系统2.4 运动规划2.5 机械臂和关节控制系统 三、分配用于控制机器人的参数3.1 定义机器人模型和运动规划参数,3.2 定义机…

基于ros1的 apollo 7.0.0规划控制算法
apollo.ros-7.0.0
上次给大家带来了之前学习apollo时开发的内容apollo.ros-1.0.0和apollo.ros-3.0.0,主要是针对apollo 1.0.0和3.0.0版本进行了ros1下的移植和规划控制算法的学习。本次在之前工作的基础上,针对apollo 7.0.0版本,进行了ros1下…
Ubuntu20.04安装RMF组件
安装Galactic版本的rmf组件(traffic-editor等)
系统环境:Ubuntu20.04
参考:
ROS2 Galactic Installation
CSDNAc君 Ubuntu20.04安装gazebo11报错
下载ROS2(Galactic)环境
查看是否为UTF-8,如果不是,进行下面的步骤 (可以不做…
创建全局路经规划插件global_planner步骤
创建全局路经规划插件global_planner步骤 1.创建一个 ROS 包:
cd ~/catkin_ws/src
catkin_create_pkg my_global_planner_plugin roscpp nav_core angles tf2_geometry_msgs costmap_2d dynamic_reconfigure geometry_msgs nav_msgs navfn pluginlib tf2_ros2.在该…
树莓派4B安装ubuntu 18.04运行ros系统
硬件:树莓派4B(4G内存版),电源(usb type-C, 5V 3A),micro SD卡(至少16G),鼠标,键盘(usb接口),显示器(HDMI接口…

运行teb_local_planner/TebLocalPlannerROS时报错
在navigation时,运行pnc导航,报了Failed to create the teb_local_planner/TebLocalPlannerROS的错误。
解决办法:
在你的工作空间catkin_ws/src下进行teb源码安装
git clone https://github.com/rst-tu-dortmund/teb_local_planner完成后…
Moveit1 机器人配置包超详细解析
前言
Moveit的robot_moveit_config包里有很多文件,在配置时容易搞不清关系,导致配置过程艰难、漫长。
同时互联网上的文档几乎没有详细介绍这部分配置包的,大神各有各的配法,比较混乱。
因此笔者整理了配置包内各个重要的文件&…
ROS导航中 的位姿描述
在ROSwiki中有urdf文件的写法如下 wiki:Create your own urdf file
...<joint name"joint2" type"continuous"><parent link"link1"/><child link"link3"/><origin xyz"-2 5 0" rpy"…
MoveIt教程 - Move Group (C++接口)
MoveIt教程 - Move Group (C++接口)
环境:
ubuntu20.04
ros noetic
克隆项目:
git clone https://github.com/ros-planning/moveit.git
git clone https://github.com/ros-planning/moveit_visual_tools.git
git clone https://github.com/ros-planning/moveit_tutori…

ROS:配置VScode
目录 前言一、下载二、vscode 安装三、vscode 集成 ROS 插件四、vscode 使用4.1 创建 ROS 工作空间4.2启动 vscode4.3vscode 中编译 ros4.4创建 ROS 功能包4.5C 实现4.6python 实现4.7配置 CMakeLists.txt4.8编译4.9执行 前言
VSCode 全称 Visual Studio Code,是微…

Cartographer学习
谷歌Cartographer学习(1)-快速安装测试(转载)转载自谷歌Cartographer学习(1)-快速安装测试代码放到个人github上,https://github.com/hitcm/如下,需要安装3个软件包,ceres solver、cartographer和cartograp…
ROS报错处理(持续更新)
1、运行节点时报错:
[rospack] Error: package test not found
没有找到ros功能包,原因是没有为功能包配置系统环境,可以利用source运行工作空间中devel目录下的setup.bash配置文件并使配置立即生效。setup.bash脚本的作用是让一些ros* 开头…
【ROS】服务通信--从理论介绍到模型实现(C++)
一、概念介绍
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。 一个节点需要向相机节点发送拍照请求,相机…
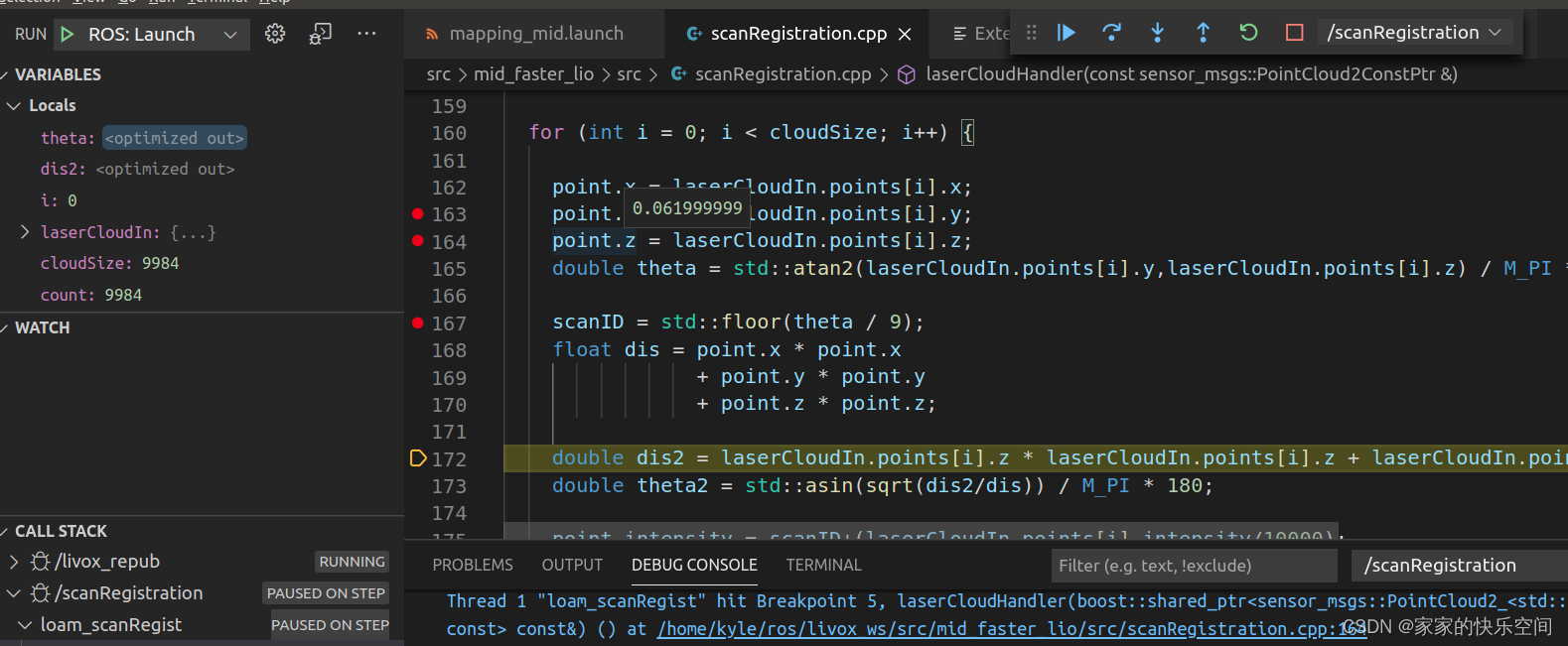
【3D激光SLAM】LOAM源代码解析--laserMapping.cpp
系列文章目录
【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp 【3D激光SLAM】LOAM源代码解析–laserOdometry.cpp 【3D激光SLAM】LOAM源代码解析–laserMapping.cpp 【3D激光SLAM】LOAM源代码解析–transformMaintenance.cpp 写在前面
本系列文章将对LOAM源代码进行讲解…
自启动遇到某个节点或者某种环境变量问题导致启动失败
前言:此次记录无人车自启动过程遇到的问题。为了让ROS无人车能够实现飞控进行室外自主航线的问题,将飞控发布的PWM转为ROS无人车对应的速度。为了确保无人车启动后能够使用遥控器控制无人车,所以需要开机自启动。
硬件:
1、star…
【ROS】TF2坐标转换及实战示例
Halo,这里是Ppeua。平时主要更新C,数据结构算法…感兴趣就关注我吧!你定不会失望。 文章目录 0.ROS中的坐标转换消息包0.1 geometry_msgs/TransformStamped0.2 geometry_msgs/PointStamped1.静态坐标转换1.1导入所需功能包1.2发布方实现1.3 …
ubuntu18.04 ros报错Command ‘roscore‘ not found
问题描述
git clone https://github.com/ros/catkin.gitcd catkingit branch melodic-develgit checkout melodic-develmkdir buildcd buildcmake …make -j8 && sudo make installcd .. sudo python2 setup.py installsudo python3 setup.py install出现问题
hua…
队列树Queue之动态限速-从零开始学RouterOS系列11
本章主要内容为讲解RouterOS静态路由的实现。
案例有两个:
1.单线静态路由
2.多线冗余的静态路由 什么是静态路由,静态路由主要作用有哪些?
静态路由就是用就是告诉路由器这个IP或者这个网段从那个网关或接口出去,这样路由器发…
防火墙Mangle-连接标记和包标记-从零开始学RouterOS系列09
本章主要用途:连接标记和包标记的关系
QOS里面的连接标记,对于主要是对于符合规则的数据包进行归类,用于其他模块的调用,如常见的队列Queue,策略路由,PCC多拨等。我们先讲解一下连接标记和包标记ÿ…

ROS:参数管理机制详解
目录 ROS:通信机制一、参数管理机制简介1.1概念1.2作用 二、参数服务器理论模型三、参数操作实现(C)3.1需求3.2参数服务器新增(修改)参数3.3参数服务器获取参数3.4参数服务器删除参数 ROS:通信机制
一、参数管理机制简介
参数服务器在ROS中主要用于实现…
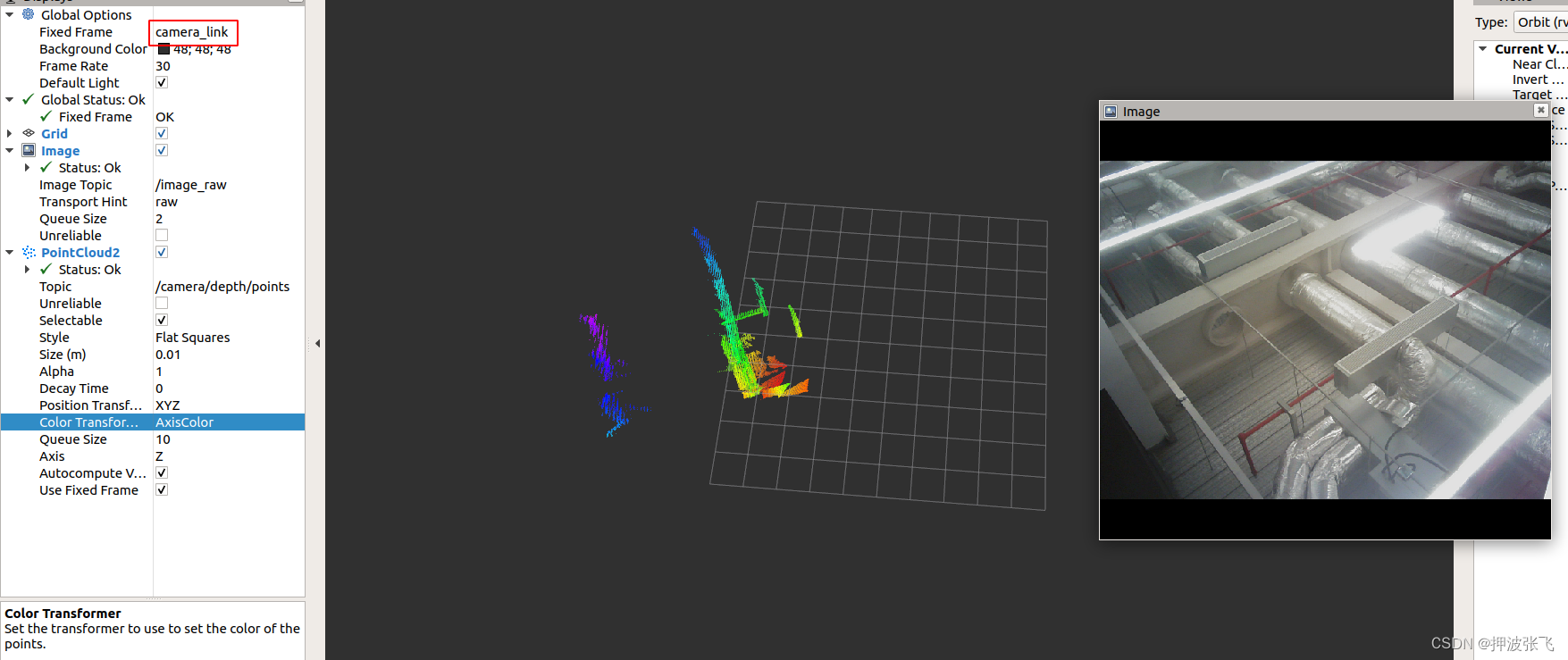
gazebo 仿真 kinect 获取点云数据
项目地址:https://github.com/yym68686/ros-slam
简介
使用 urdf 文件构建仿真机器人,在 gazebo 搭建仿真环境,导入人造卫星的 stl 文件,利用仿真 kinect 深度相机获取人造卫星的点云数据并在 RVIZ 中可视化,将 Poin…
ros项目开发之在clion开发工具中增加c++模板类
ros项目开发之在clion开发工具中增加c++模板类
模板功能: 1.包含一个类 文件名即类名,包含一个main方法 2.包含一个 与该节点的 service 通讯,消息名称用此文件名命名; 3.包含一个定时执行器 4.包含一个多线程函数 5.包含数据库查询和刷新(需要有此服务功能的才能使用,目…
【ROS】—— ROS常用组件_TF坐标变换_多态坐标变换与TF坐标变换实操(十一)
文章目录前言1. 多态坐标变换1.1 发布方1.2 订阅方(C)1.3 订阅方(python)2. 坐标系关系查看3. TF坐标变换实操(C)3.1准备3.2 生成新的乌龟3.3 增加键盘控制3.4 发布方(发布两只乌龟的坐标信息)3.5 订阅方(解析坐标信息并生成速度信息)前言 📢本系列将依托赵虚左老师…
从0手写两轮差速机器人urdf模型
文章目录 前言一、基本理论二、实现步骤1.创建一个机器人建模功能包2.使用圆柱体创建一个车体模型2.同理创建机器人其它构件3.机器人模型添加传感器 前言
最近为找到与自己课题应用场景相适应的机器人结构,对机器人建模方面的内容进行了了解和学习,计划…
DJI 无人机Onboard SDK ROS 3.8.1 软件默认配置运行问题及解决方法
DJI 无人机Onboard SDK ROS 3.8.1 软件默认配置运行问题及解决方法连接设备启动SDKDJI Onboard SDK ROS 3.8.1是可以直接适配 M210飞机,但是对于A3飞控,由于没有双目相机,直接运行会报错,本篇博客记录遇到的问题,及解决…
ROS 不能再详细的安装教程
原网址:http://www.cnblogs.com/liu-fa/p/5779206.html作者小萌是个球,纯照着做的 16.04 麒麟 跑出来了,小萌是个球机器人操作系统(ROS),SLAM,机器人视觉,自然语言处理,模式识别HomeRobotROSSLA…

ROS自带OpenCV和本地OpenCV版本冲突问题解决
1、报错信息
首先catkin_make编译功能包没有任何问题,100%生成目标文件,但是报了警告:库文件libmyslam.so需要的是libopencv_core.so.3.4,可能会与libopencv_core.so.3.2冲突。根据工程经验,警告不用管,直…
关于提高PX4抗风性
滚转角速率控制器:(MC_ROLLRATE_P, MC_ROLLRATE_I, MC_ROLLRATE_D)
滚转角速率控制器:(MC_PITCHRATE_P, MC_PITCHRATE_I,MC_PITCHRATE_D)
滚转角速率控制器…
ROS从入门到精通系列(二十九)-- linux封装ROS 自启动脚本及可执行程序App
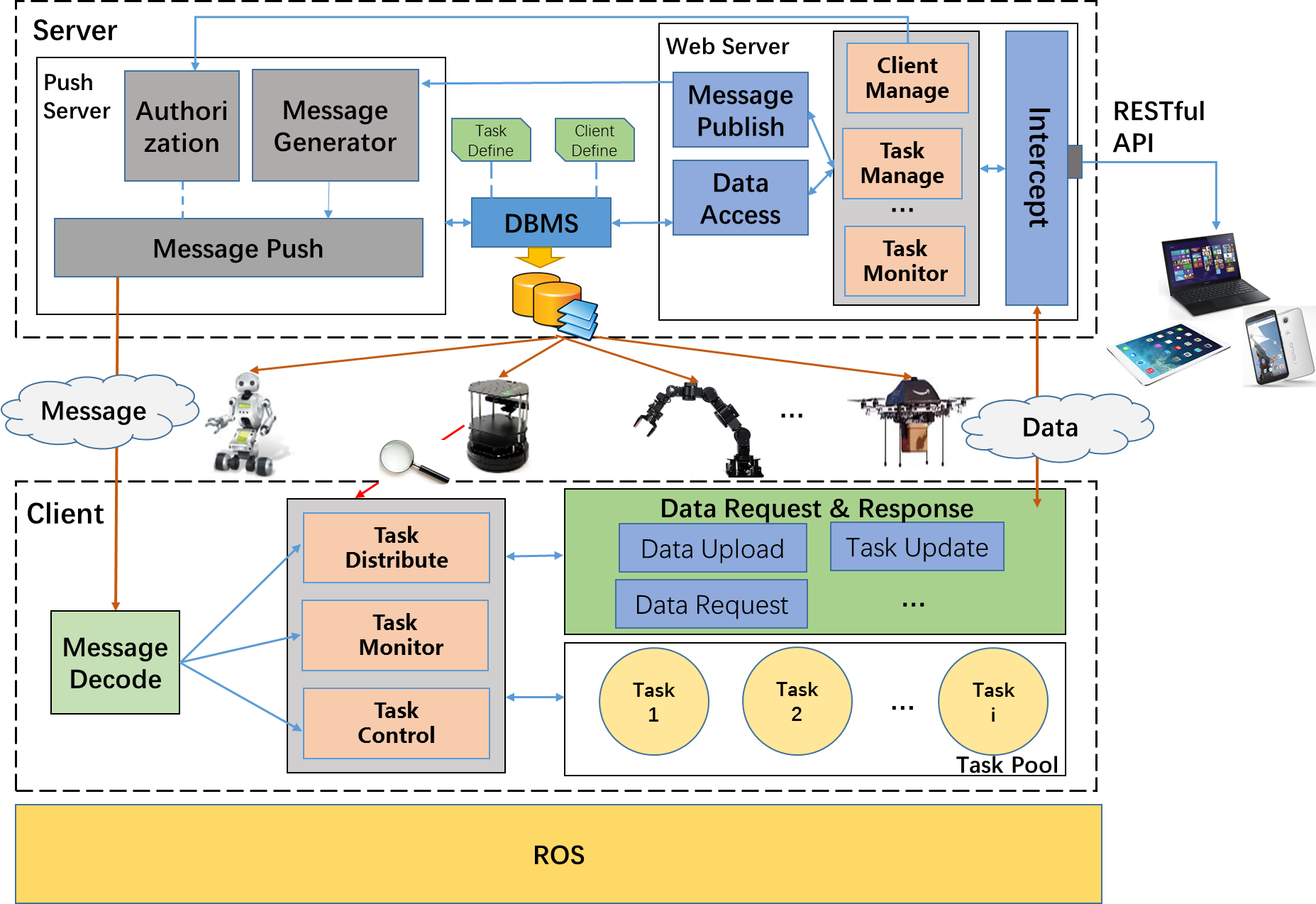
机器人分布式处理架构ROS分布式架构,HiBot架构主要使用C/S架构,其中HibotServer为服务器,Muqutte为消息服务器中间件,HiBotClient为运行在机器人上的客户端。主要实现了机器人任务的远程部署、监控、控制三大功能,机器人平台依赖于ROS。其架构如下图所示 Img Src: https:/…
ubuntu20.04中安装ROS系统,详细介绍各种错误解决方法,直达小海龟
因为最近学习的缘故,花了半天的时间安装了ROS,期间因为ubuntu也是临时安装的双系统,遇到了各种各样的问题,这里记录一下,主要集中在ROS系统安装问题的解决。
Ubuntu系统的安装
ubuntu系统的安装网上已经有很多详细的…
AR Tag 在 ROS 中的使用
本文简单介绍了 AR Tag 及其运用的场景,并介绍了其在 ROS 中的安装和使用。 文章目录什么是 AR TagAR Tag 的使用场景在 ROS 中的使用安装 ar_track_alvar标签的生成在 ROS 中的使用创建 launch 文件launch 文件解析rviz 展示效果在程序中使用References什么是 AR T…

ROS学习笔记(零):ROS与机器人概述
ROS学习笔记(零):ROS与机器人概述ROSROS的起源ROS的特点ROS架构设计机器人机器人的定义机器人的组成执行机构驱动系统传感系统控制系统ROS ROS的起源
ROS(Robot Operating System)是一个广泛使用的机器人操作系统&…
基于树莓派的OpenEuler基础实验二
文章目录 基于树莓派的OpenEuler基础实验二一、ROS中间件介绍1. ROS话题通信与服务通信2. 常见的ROS终端命令 二、中间件基础实验1. ROS的移植2. ROS的安装和环境配置3. 第一个ROS实践之开启小海龟4. ROS话题实践1)ROS工作区与软件包的创建2)ROS的话题通…
cartographer+EAI ydlidar雷达配置过程
cartographerEAI ydlidar雷达配置过程
一、配置环境(安装驱动)
1、系统环境:ubuntu16.04ROS-kinetic
2、安装ROS-kinetic 详细说明过程 http://wiki.ros.org/kinetic/Installation/Ubuntu
二、代码程序
见附件
三、说明文档(…
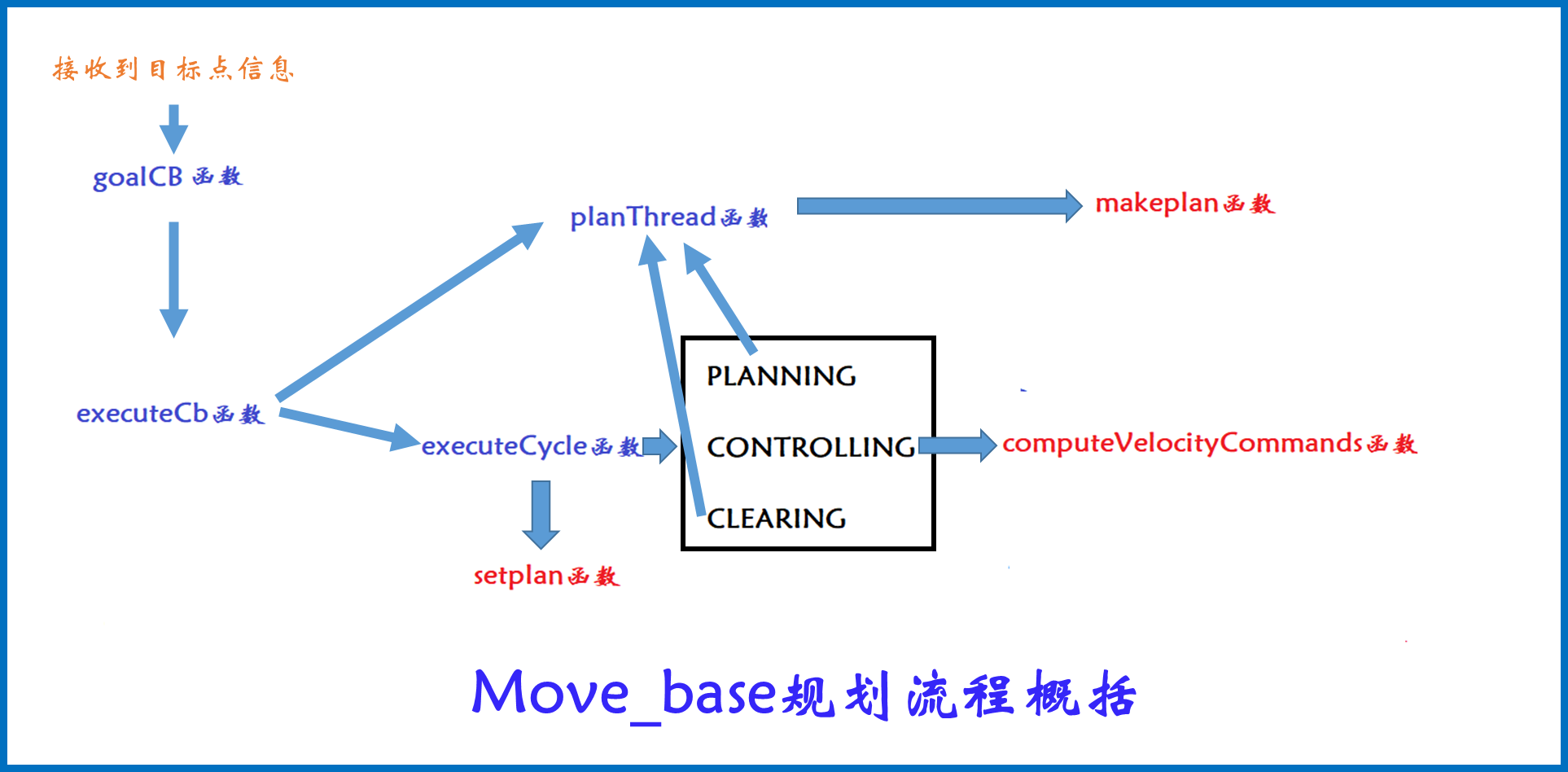
ROS导航包Navigation中的 Movebase节点路径规划相关流程梳理
本文主要介绍ROS导航包Navigation中的 Movebase节点中的路径规划的相关流程,并对其进行梳理概括,同时本文也是《ROS局部路径规划器插件teb_local_planner规划流程概括总结》部分的前述文章。 1、接收到目标点信息goal 在接收到目标点goal之后,…

【ROS】如何让ROS中节点实现数据交换Ⅱ --服务通信
Halo,这里是Ppeua。平时主要更新C语言,C,数据结构算法…感兴趣就关注我吧!你定不会失望。 本章将介绍如何通过服务通信的方式实现节点数据交换以及ROS相关指令 本章将介绍如何通过服务通信的方式实现节点数据交换以及ROS相关指令…
SLAM面试笔记(5) — ROS面试
目录
1 ROS概述
2 ROS通信机制
问题:服务通信概念
问题:服务通信理论模型
3 常见面试题
问题:roslaunch和rosrun区别?
问题:什么是ROS?
问题:ROS中的节点是什么?
问题&…
【ROS2】学习笔记
1. 基础概念
1.1 执行单元
1.1.1 executable——执行程序
executable表示针对某个目标的程序执行流程,一个executable可以启动多个node;
1.1.2 node——“进程”
node其实就是进程的意思; ROS2允许同时启动两个相同的node,&a…
ROS学习(5)——话题消息与服务
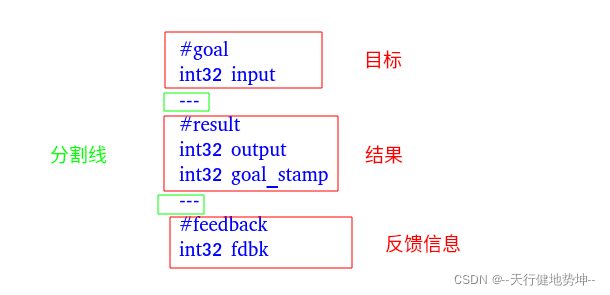
节点之间的消息通信分为几种形式: 话题(topic):单向消息发送/接收方式服务(service):双向消息请求/响应方式动作(action):双向消息目标(goal)/结果(result)/反馈(feedback)方式参数服务器(参数共享模式) 种类区别话题异步单向连续单向的发送/接收数据的情况服务同步…

ROS2 msg和srv CMake编写注意事项
ROS2使用msg和srv可以参考官网: 工程文件cpp所包含的头文件,其中 cpp_pubsub_self/msg/test.hpp 为msg消息消息生成的头文件,具体的可以参考官网
注意事项:
在 ROS2 当中,使用 msg 和 srv 消息文件格式的时候&#…

ROS:服务端Server的编程实现
目录 一、服务模型二、创建功能包三、创建代码并编译运行(C)3.1步骤3.2创建服务端Server代码3.3编译3.4运行 一、服务模型 Server端本身是进行模拟海龟运动的命令端,它的实现是通过给海龟发送速度(Twist)的指令&#x…
world_canvas的ros项目安装部署
world_canvas_server安装部署
系统ubuntu20.04
ros:noetic
克隆代码:
cd /home/sukai/workspace/roskaiyuanweb/catkin_ws_work_canvas/src
git clone https://github.com/corot/world_canvas.git
git clone https://github.com/corot/world_canvas_libs.git
gi…

从零搭建一台基于ROS的自动驾驶车-----4.定位
系列文章目录
北科天绘 16线3维激光雷达开发教程 基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图 Nvidia Jetson Nano学习笔记–串口通信 Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出 Autolabor ROS机器人教程 从零搭建一台基于ROS的自动驾驶车-----1.整体介…
realsenseD435i运行vins-mono
目录写在前面准备编译vins-mono:修改launch:realsense:vins-mono:运行参考完写在前面
1、本文内容 realsenseD435i运行vins-mono
2、平台 ubuntu1804, ros melodic 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/126777778
准备
编译v…

ros 工作空间的覆盖、c++编程接口实现通信方式、自定义消息格式、分布式多机通信
目录
工作空间的覆盖
通信方式的c实现
话题
服务
动作
分布式通信
多机通讯 工作空间的覆盖
同一个工作空间下,不允许出现同名的功能包,否则无法编译。不同工作空间下,允许出现同名的功能包,但会出现工作空间覆盖的现象。…

ROS:话题通信机制详解
目录 ROS:通信机制一、话题通信简介二、话题通信实操(C)2.1分析2.2发布方代码2.3订阅方代码2.4配置CMakeLists.txt2.5执行2.6注意 三、话题通信实操(python)3.1分析3.2发布方代码3.3订阅方代码3.4添加可执行权限3.5配置…

rosbridge使用案例心得总结之_第三篇在虚拟机中设置IP地址
目录
一、简介 二、修改默认的IP地址配置 一、简介 我们后期再使用Hbuild做web和ros通信,使用windows虚拟出的Ubuntu20.04 的时候,需要用到虚拟机ros端的IP地址,默认情况下,虚拟机设定的网络是NAT(网络地址转换&#…
launch文件remap标签
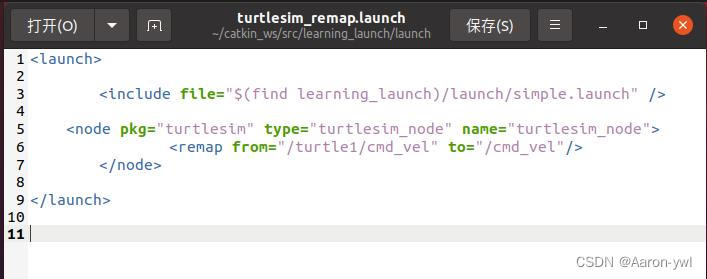
一、remap用于topic的映射
下面是两个launch启动两个节点的例子: 一个节点叫talker,它发布一个topic名为/talker 一个节点叫test1,它订阅一个topic名为/talker_mid
<!--start_talker.launch-->
<launch> <node pkg&quo…
安装rtabmap_ros包
一、前言
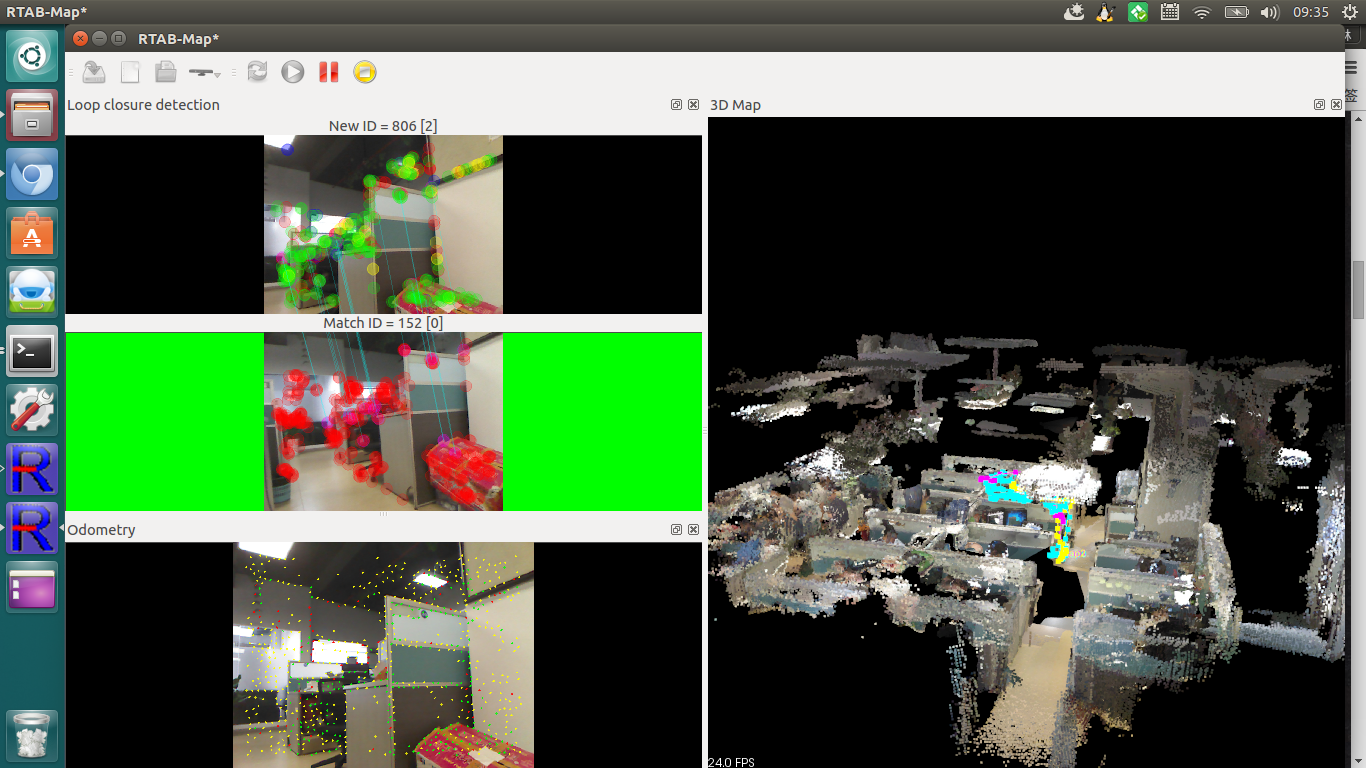
RTAB-Map (Real-Time Appearance-Based Mapping)是一种基于全局贝叶斯闭环检测的RGB-D Graph SLAM方法。它可以用kinect的深度信息结合kinect变换得到的激光数据进行即时定位与建图(gmapping算法志只用到了kinect转换得到的激光数据,而把深度信…
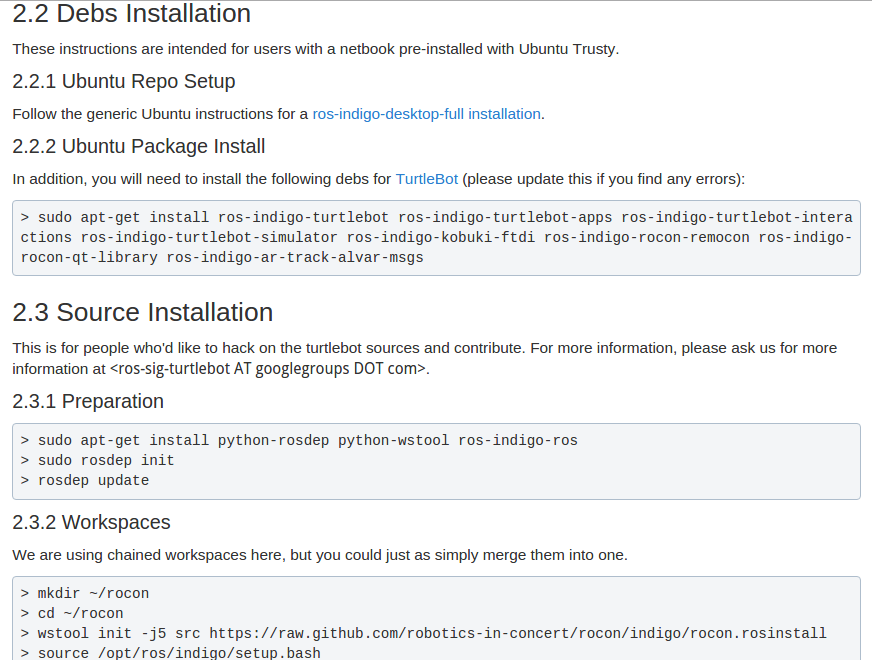
ROS的安装、卸载以及Turtlebot包的安装
一、前言
我的运行环境: 操作系统:Ubuntu Kylin 14.04 ROS版本:Indigo 背景说明:本文记录了ROS的安装和卸载过程与Turtlebot包的安装过程以及其间遇到的问题 本文地址:http://blog.csdn.net/u013453604/article/d…
【turtlebot】turtlebot运行报错解决方案
一、
【问题描述】:
博主将turtlebot_node.py里的has_gyro值改为False,再用cp命令将之替换掉了/opt/ros/indigo/lib里的turtlebot_node.py,随后不久出现了以下问题
连上turtlebot运行下列语句
$ roslaunch turtlebot_bringup minimal.lau…
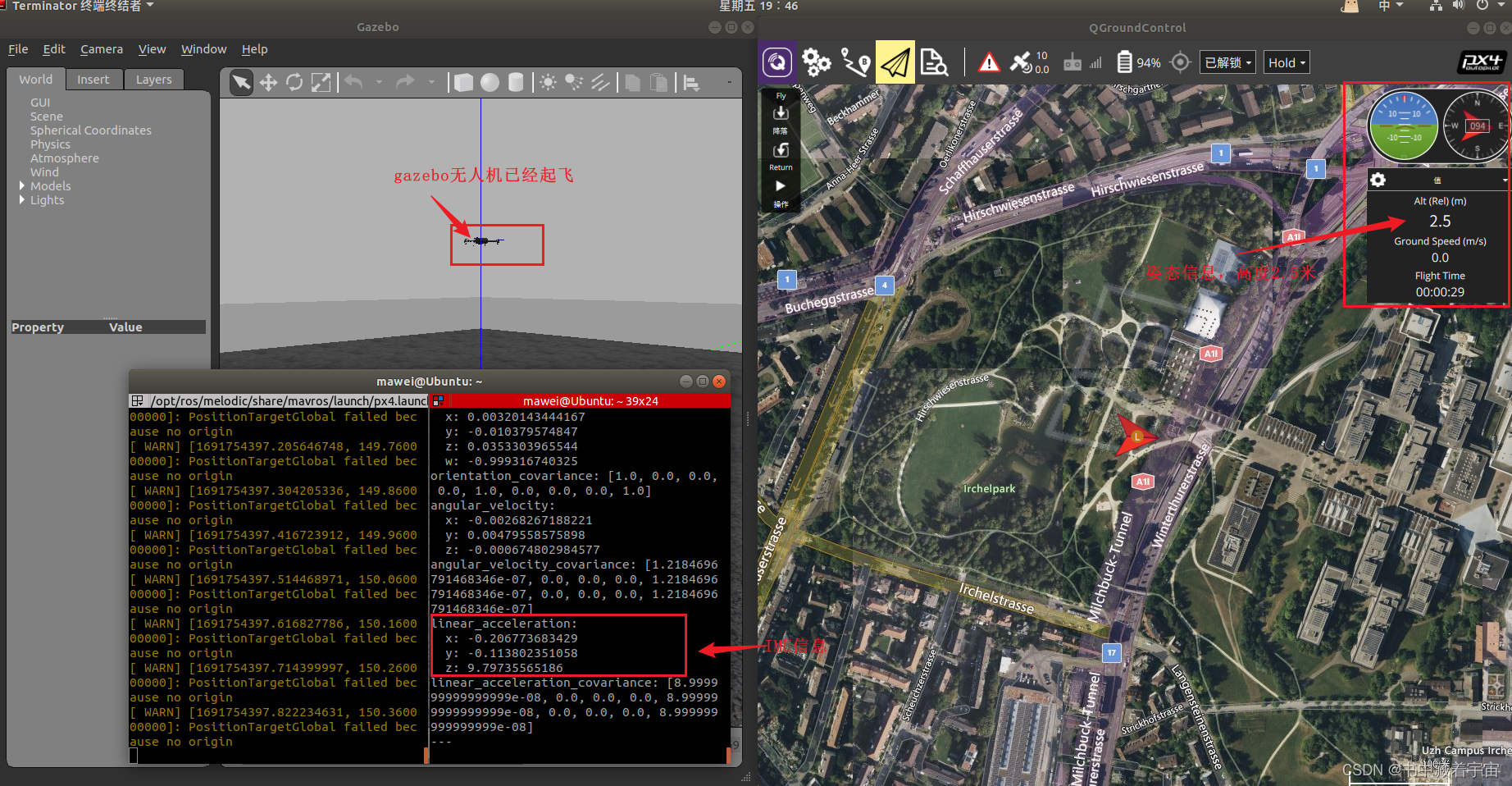
gazebo与PX4联合仿真
自主无人机定义 功能框架 开发流程 项目代码框架 项目流程 gazebo的文件类型 仿真的类型
⮚ SITL 全称为Software in the loop,即软件在换仿真。 ⮚ 仿真首先分为软件在环仿真(SITL)和硬件在环仿真(HITL&a…
ROS学习笔记(三)---好用的终端Terminator
ROS学习笔记文章目录
01. ROS学习笔记(一)—Linux安装VScode 02. ROS学习笔记(二)—使用 VScode 开发 ROS 的Python程序(简例)
一、Terminator是什么?
在前面的学习中,为了运行hello.py我是在vscode频繁的点击运行窗口的“”号…
在ROS编程中 ros::spin()和ros::spinOnce()的意义与区别
参考链接: https://blog.csdn.net/datase/article/details/79742421
http://www.cnblogs.com/liu-fa/p/5925381.html

【ROS】例说mapserver静态地图参数(对照Rviz、Gazebo环境)
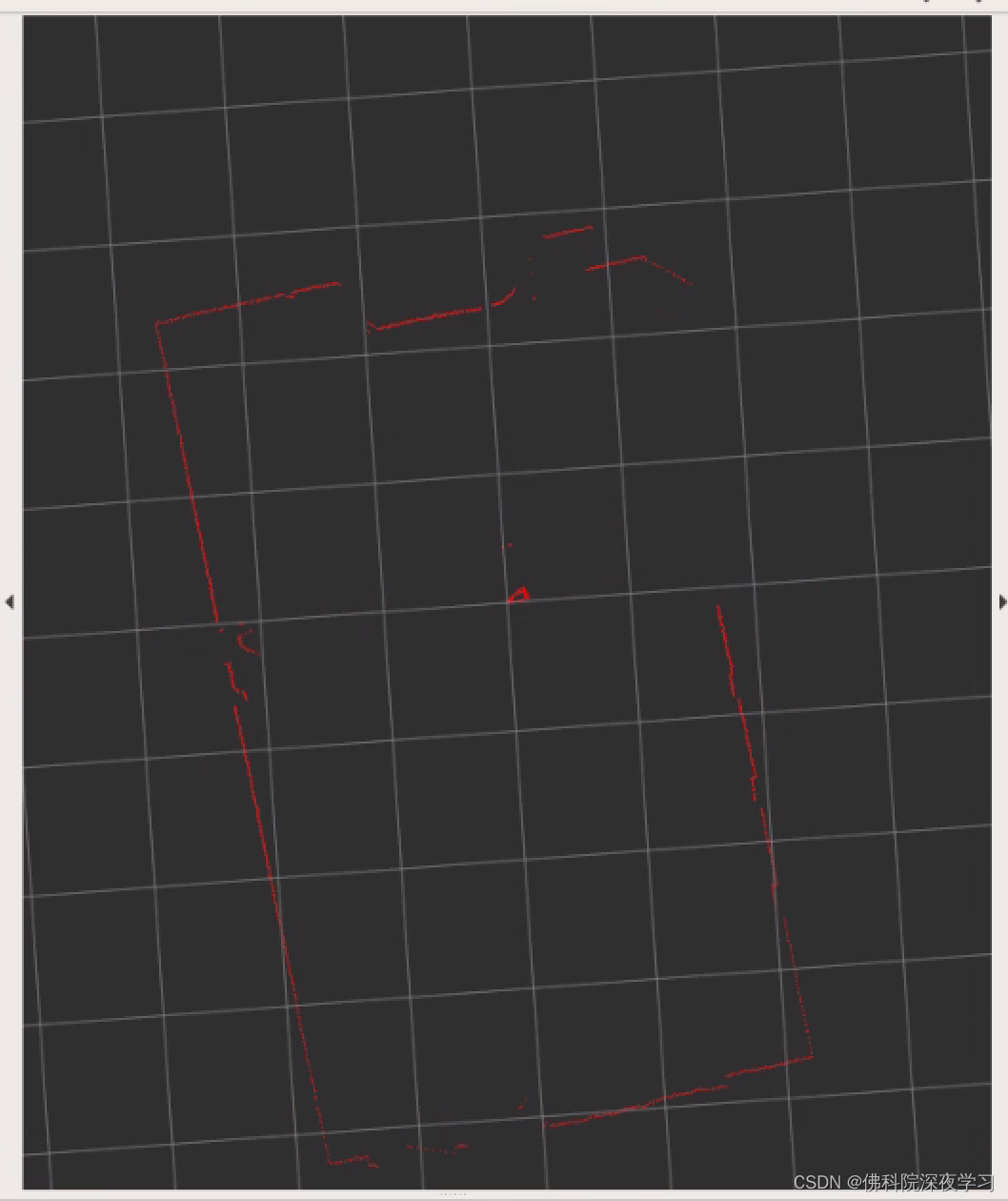
文章目录 例说mapserver静态地图参数1. Rviz中显示的地图2. mapserver保存地图详解3. 补充实验 例说mapserver静态地图参数
1. Rviz中显示的地图
在建图过程中,rviz会显示建图的实时情况,其输出来自于SLAM,浅蓝色区域为地图大小,…

双系统 + Ubuntu20.04 + ros2 (foxy) git clone -b连接不成功的解决
一、问题描述
虚拟机已经跑通turtlebot3,能成功进行编译,进而执行自主避障,启动house地图,SLAM建图,SLAM导航等任务。但由于虚拟机加载gazebo模型太慢,且考虑到后面计划进行多机通讯,故配置双系…
ROS_melodic+ D455+rtabmap 视觉建图
ROS 部署
请参阅之前的文章:Ubuntu 18.04 ROS
创建工作空间
mkdir catkin_ws/src
cd catkin_ws/src
catkin_init_workspace
cd ..
catkin_make安装Rtabmap
sudo apt install ros-melodic-rtabmap ros-melodic-rtabmap-ros将param和maping_navigation两个文件夹复…

在gazebo仿真环境中加载多个机器人
文章目录 前言一、基本概念1、xacro2、Gazebo 加载单个机器人模型 二、原先launch文件代码三、 修改launch文件加载多个机器人总结 前言
单个机器人的各项仿真实验都基本完成,也实现了远程控制,接下来主要对多机器人编队进行仿真实验,在进行…
yolov8封装进入ROS系统
一,yolov8的环境配置工作 说明:需要相关工程全部源码的可私聊博主或评论留言 配置工作可以参考我的一篇关于yolov8环境配置的博客。 需要说明的是:直接使用: pip install ultralytics 会导致后面对于网络结构的改进无法运行。所以如果需要对网络结构进行改进的同学,不要使用…
PX4仿真添加world模型文件,并使用yolov8进行跟踪
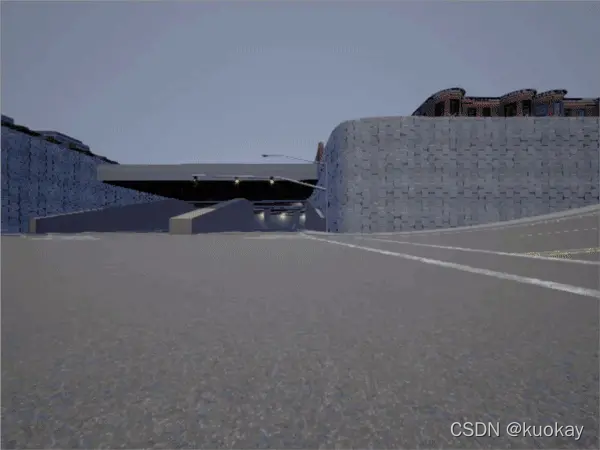
前言
目的:我们是为了在无人机仿真中使用一个汽车模型,然后让仿真的无人机能够识别到这个汽车模型。所以我们需要在无人机仿真的环境中添加汽车模型。
无人机仿真中我们默认使用的empty.world文件,所以只需要将我们需要的模型添加到一起写进这个empty.world文件中去就可以…
Jetson Orin NX 开发指南(7): EGO-Swarm 的编译与运行
一、前言
EGO-Planner 浙江大学 FAST-LAB 实验室的开源轨迹规划算法是,受到 IEEE Spectrum 等知名科技媒体的报道,其理论技术较为前沿,是一种不依赖于ESDF,基于B样条的规划算法,并且规划成功率、算法消耗时间、代价数…

ROS架构:文件系统 - 计算图
一、ROS架构简介
立足不同的角度,对ROS架构的描述也是不同的,一般我们可以从设计者、维护者、系统结构与自身结构4个角度来描述ROS结构:
1. 设计者
ROS设计者将ROS表述为 ROS Plumbing Tools Capabilities Ecosystem
Plumbing:通讯机…
关于ROS的网络通讯方式TCP/UDP
一、TCP与UDP
TCP/IP协议族为传输层指明了两个协议:TCP和UDP,它们都是作为应同程序和网络操作的中介物。
**TCP(Transmission Control Protocol)协议全称是传输控制协议,是一种面向连接的、可靠的、基于字节流的传输…

基于ubuntu1604的ROS安装
不同版本的Ubuntu都有对应的ROS版本,不要强行安装不对应的版本,否则遇到问题会很难找到解决方法。此教程也只是基于Ubuntu1604和kinetic版本的ROS。
一、基本流程
以下命令仅记录执行顺序,不要无脑复制执行,重在理解
#基本更新…
Ubuntu18.04搭配无人机仿真环境(ROS,PX4,gazebo,Mavros,QGC安装教程)
Ubuntu18.04搭配无人机仿真环境 ROS环境配置版本安装 gazebo安装Mavrosa安装PX4源码下载和编译运行仿真地面站安装 ROS环境配置
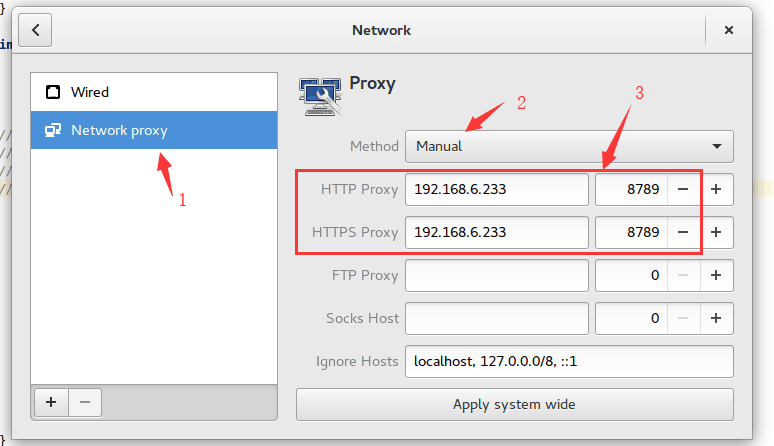
我个人使用了代理环境进行下载。Linux没有代理的可以使用国内源。
清华大学源 sudo sh -c ‘. /etc/lsb-release && echo “deb http://m…
【ROS系统】colcon编译器的使用
colcon编译器
参考链接:https://www.rstk.cn/news/33292.html?actiononClick 指令教学:https://blog.csdn.net/u014603518/article/details/127717928
基础指令colcon build
参数及效果
无参数
colcon build : 编译子环境下的全部ROS2项目依赖
--…
MATLAB 机械臂逆运动学进行轨迹控制建模
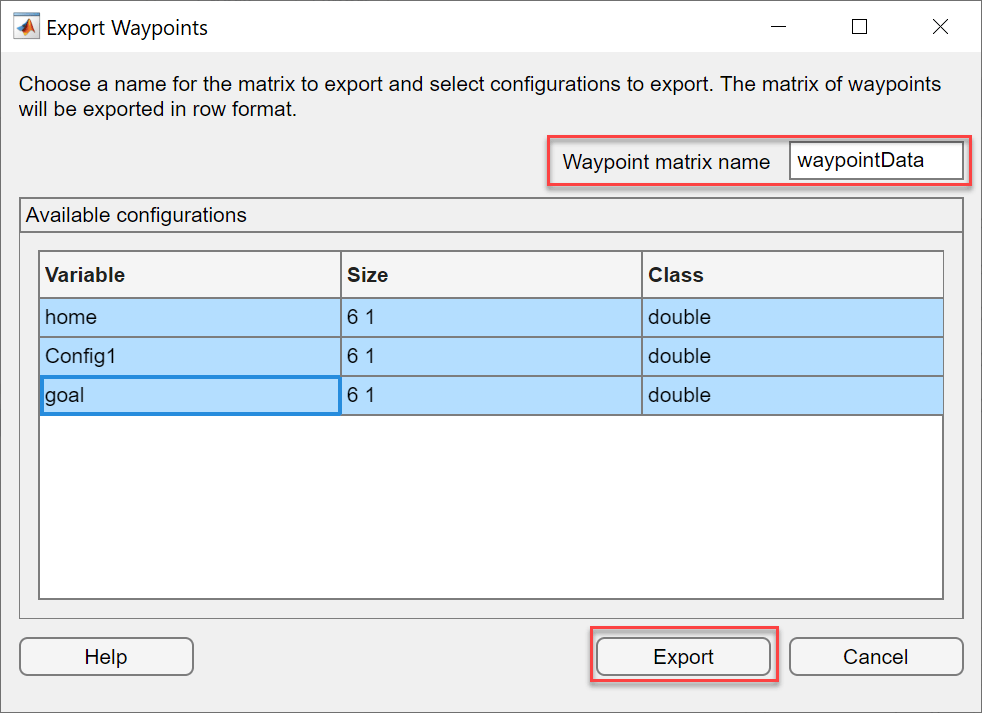
系列文章目录 文章目录 系列文章目录前言一、模型概览1.1 Target Pose Generation 目标姿势生成1.2 Inverse Kinematics 逆运动学1.3 Manipulator Dynamics 机械手动力学1.4 Pose Measurement 姿势测量 二、机械手定义三、生成航点四、模型设置五、模拟机械手运动六、将结果可视…
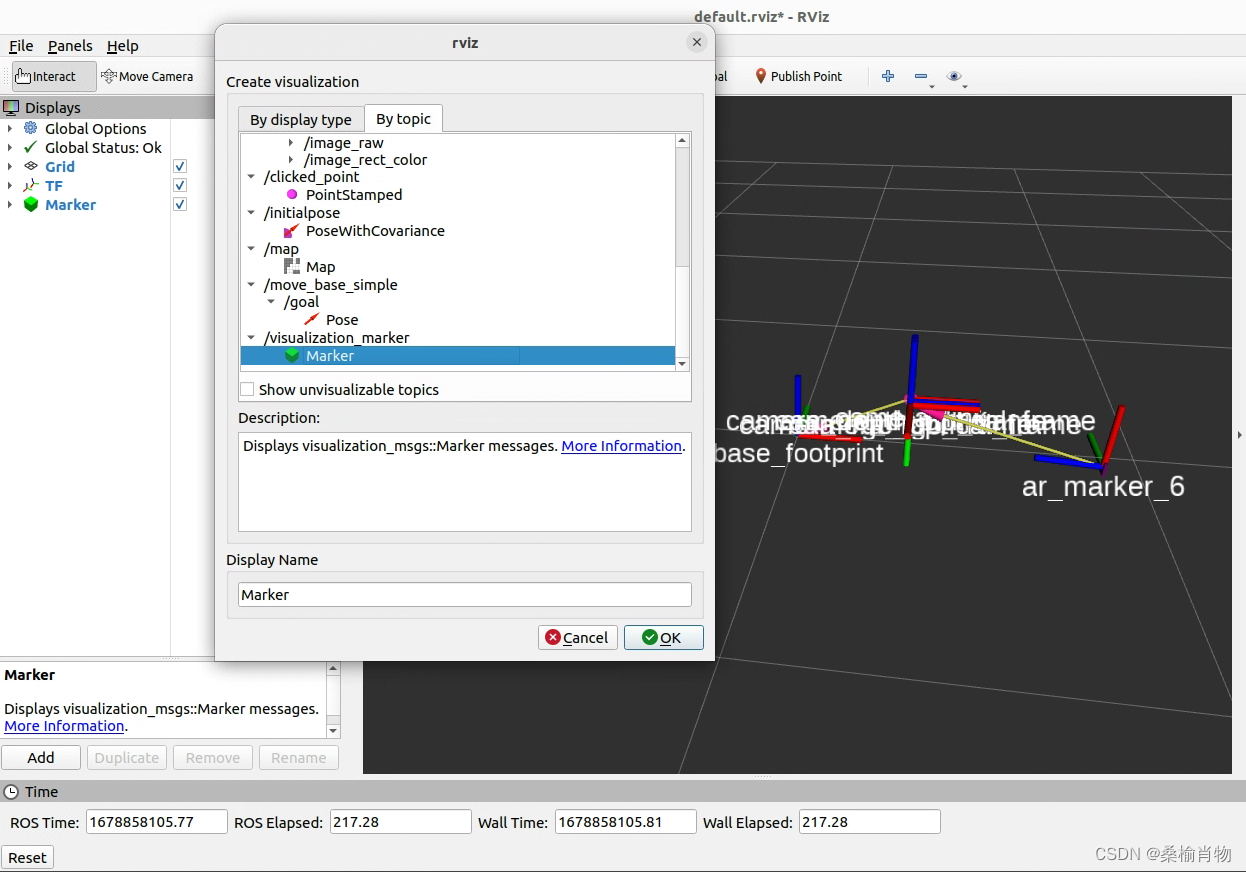
Interactive Marker Publish Pose All the Time (Interactive Marker通过topic一直发送其状态)
以下代码实现了:Interactive Marker通过topic一直发送其状态,而不只是交互时才发送。 几个要点:
通过定时器rospy.Timer实现PublishInteractiveMarkerServer feedback.pose的类型是geometry_msgs/Pose,而不是geometry_msgs/PoseS…

Ubuntu18.04安装A-Loam保姆级教程
系统环境:Ubuntu18.04.6 LTS
1.A-Loam的安装前要求:
1.1 ROS安装:参考我的另一篇博客
Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客还是那句话,有时候加了这行也不好使,我是疯狂试了20次&#…
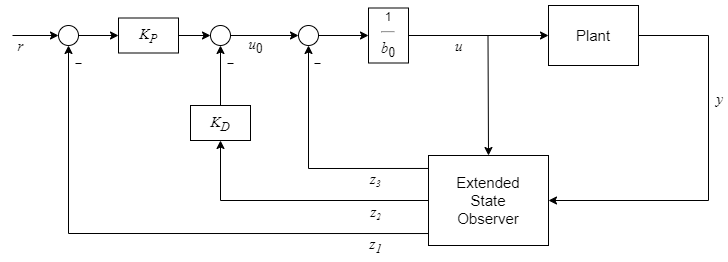
MATLAB 自抗扰控制 - Active Disturbance Rejection Control
系列文章目录
MATLAB 模型参考自适应控制 - Model Reference Adaptive Control 文章目录 系列文章目录前言一、控制器结构1.1 一阶逼近1.2 二阶逼近 二、指定控制器参数参考 前言
自抗扰控制 (ADRC) 是一种无模型控制方法,适用于为具有未知动态特性以及内部和外部…

Ros智行mini,opencv,Gmapping建图,自主导航auto_slam,人脸识别,语音控制
功能 一、Gmapping建图
二、自主导航 起始点 、终点
三、人脸识别
四、语音控制
完成任务: 机器人先建图 建完图后给出目标点,机器人就可以完成调用自主导航走到目标点,期间会调用激光雷达扫描局部环境来进行自主避障,到达终点后进行语音…

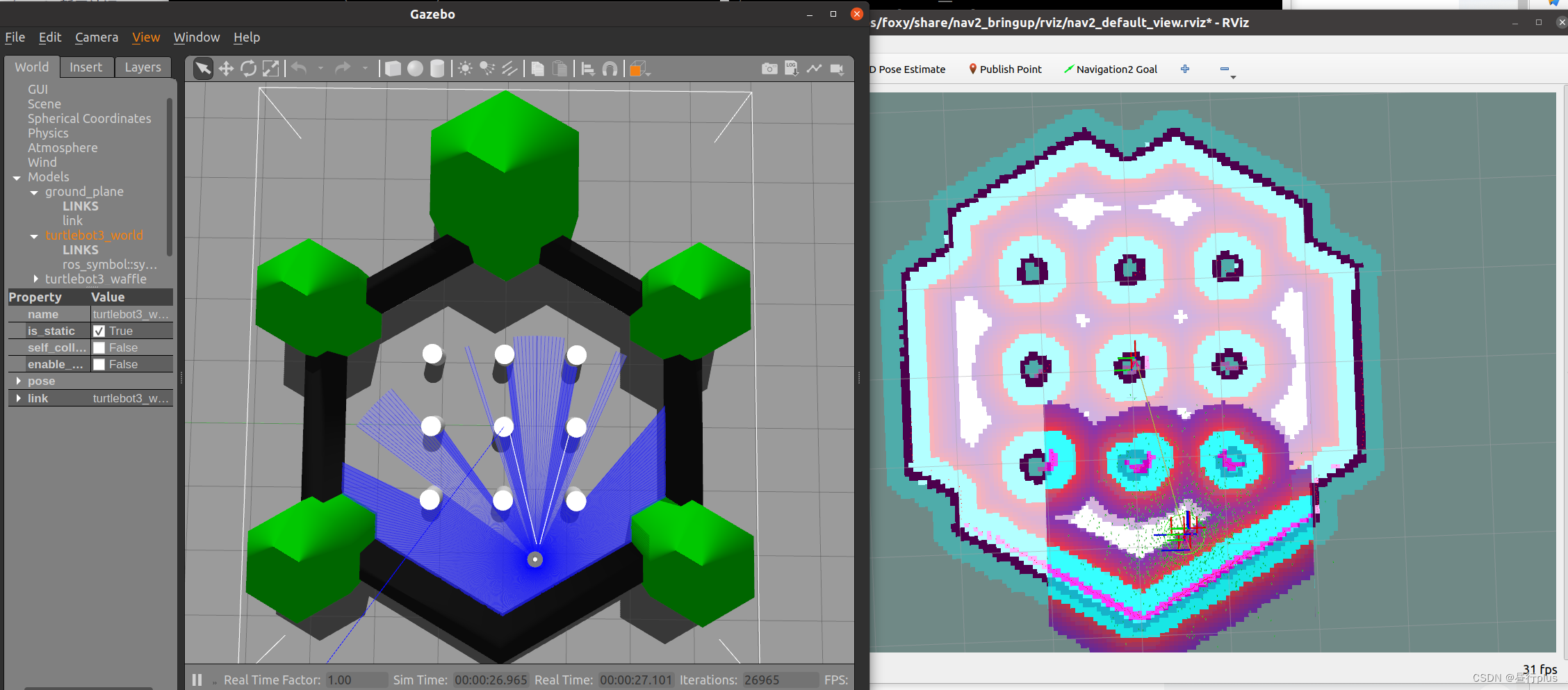
ROS 多机器人导航RVIZ环境的配置
文章目录 前言一、添加多个2D Pose Estimate/2D nav Goal二、RVIZ的其他配置1.RobotModel 总结 前言
前文ROS Turtlebot3多机器人编队导航仿真写了多机器人呢导航的代码实现,本文主要说明,RVIZ导航环境的配置,如何添加多个2D Pose Estimate/…
【ROS】话题通信--从理论介绍到模型实现
1.简单介绍
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。像雷达、摄像头、GPS… 等等一些传感器数据的采集,也都是使用了话题通信,换言之…

【ROS教程demo】用C++创建一个ROS节点,发布指令使得小海龟做圆周运动
ROS创建节点发布命令使得小海龟做圆周运动 1.任务需求2.任务分析2.1发布方topic和msg2.2接收方topic和msg2.3目标明确!3.创建ROS节点3.1创建发布方节点pub_pose3.2创建订阅方节点sub_pose1.任务需求 创建一个节点,在其中实现一个订阅者和一个发布者,完成以下功能: 发布者:…
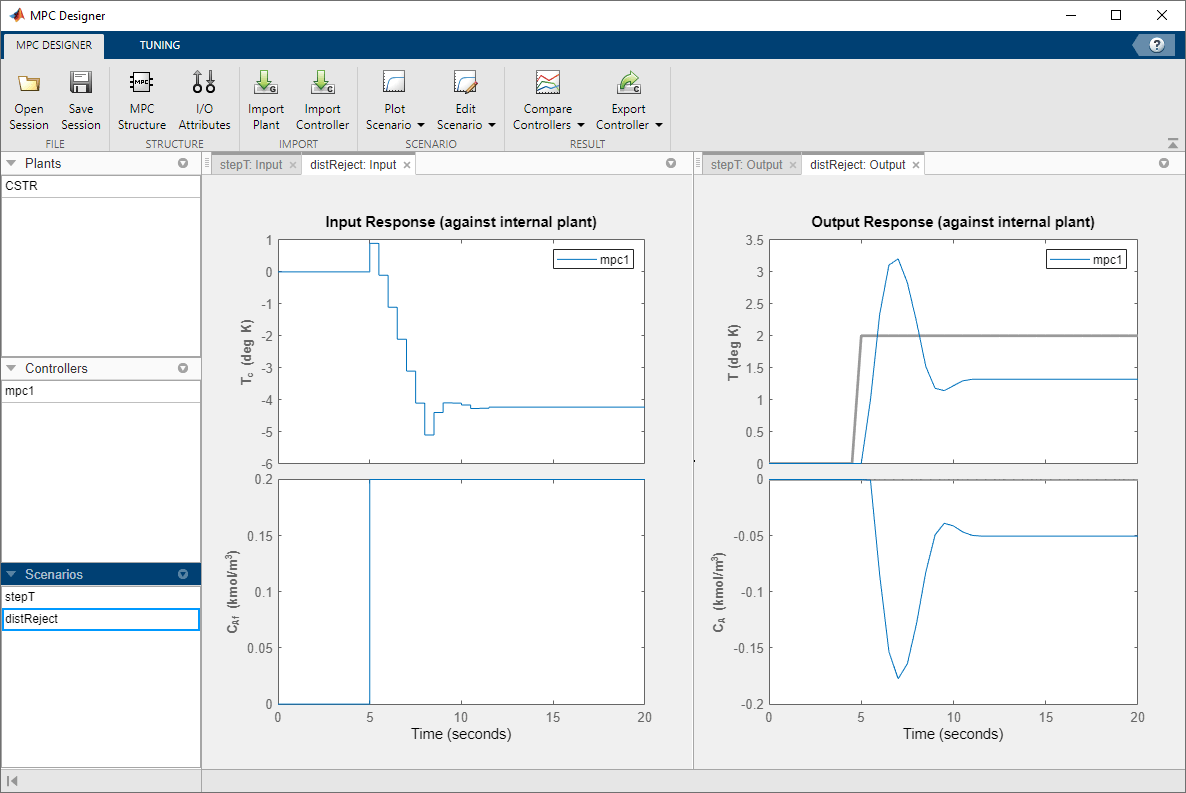
MATLAB 模型预测控制(MPC)控制入门 —— 设计并仿真 MPC 控制器
系列文章目录 文章目录 系列文章目录前言一、使用 MPC Designer 设计控制器1.1 CSTR 模型1.2 导入被控对象并定义 MPC 结构1.3 定义输入和输出通道属性1.4 配置仿真场景1.5 配置控制器水平线1.6 定义输入约束条件1.7 指定控制器调整权重1.8 消除输出超调1.9 测试控制器抗干扰能…

路径规划 | 图解Theta*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 A*算法的局限性2 Theta*算法原理图解3 Bresenham视线法4 算法仿真测试4.1 算法流程图4.2 ROS C 实现4.3 Python实现4.4 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全…
ROS学习笔记(七)---参数服务器
ROS学习笔记文章目录
01. ROS学习笔记(一)—Linux安装VScode 02. ROS学习笔记(二)—使用 VScode 开发 ROS 的Python程序(简例) 03. ROS学习笔记(三)—好用的终端Terminator 04. ROS学习笔记(四)—使用 VScode 启动launch文件运行多个节点 05. ROS学习笔…

yocto stm32mp1集成ros
yocto stm32mp1集成ros yocto集成ros下载meta-rosyocto集成rosrootfs验证 yocto集成ros
本章节介绍yocto如何集成ros系统用来作机器人开发。
下载meta-ros
第一步首先需要下载meta-ros layer,meta-ros的链接如下:https://github.com/ros/meta-ros/tre…
【实战项目开发技术分享】ChatGPT与机器人的交互
文章目录 前言一、PromptCraft-Robotics1.1 当今机器人技术面临的挑战1.2 ChatGPT如何提供帮助1.3 使用ChatGPT进行机器人任务的设计原则二、EMOTIBOT2.1 使用的技术栈2.2 实现功能2.3 硬件架构三、ROSGPT四、TurtleSim ChatGPT五、Rofunc-ros七、StackChan八、Chatgpt-minipup…
MATLAB - Gazebo 仿真环境
系列文章目录 前言
机器人系统工具箱(Robotics System Toolbox™)为使用 Gazebo 模拟器可视化的模拟环境提供了一个界面。通过 Gazebo,您可以在真实模拟的物理场景中使用机器人进行测试和实验,并获得高质量的图形。
Gazebo 可在…

使ros1和ros2的bag一直互通
很多文章都是先source ros1 然后source ros2,再play bag
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
ros2 bag play -s rosbag_v2 kitti_raw00.bag 但实测会出问题:
为使ros1和ros2的bag一直互通
sudo apt update
sudo apt install ros-foxy-ro…
使用ROS与Movelt实现myCobot 280运动轨迹规划和控制
ROS的技术案例 Introduction 今天这篇文章将记录我使用myCobot 280 M5stack 在ROS当中是如何使用的。为什么使用ROS呢,因为提及到机器人都离不开ROS这个操作系统,今天是我们第一次使用ROS这个系统。 今天我将从ROS的介绍,环境的配置以及mycob…

ROS2 驱动思岚G4雷达(ydlidar)- Rviz显示
记录G4雷达的配置 系统环境为:Ubuntu22.04 配置步骤
1、安装雷达SDK 2、构建 G4 雷达 ROS2 项目工程文件 3、使用Rviz可视化界面显示 1、安装雷达SDK
1.1 安装CMake
YDLidar SDK需要CMake 2.8.2作为依赖项
Ubuntu 18.04或者Ubuntu 22.04
sudo apt install cmak…

ROS 系列学习教程(总目录)
ROSLearning 一、ROS概览
1.1 ROS简介
To be continued…
1.2 ROS安装
Ubuntu 安装 ROS 详细教程(以最后一个ROS1版本Noetic为例)
1.3 ROS Hello World
ROS创建工作空间添加包并编译
ROS Hello World
1.4 ROS架构
ROS架构:文件系统 …
OCS2 入门教程(三)- 最优控制模块
系列文章目录 前言 在本页中,我们将为您提供如何定义 MPC 问题的一些提示。在 OCS2 中,OptimalControlProblem 结构定义了优化问题的主要组成部分,即动力学、成本和约束条件。 除此之外,您可能还希望为 MPC 提供一些参考轨迹、预定…
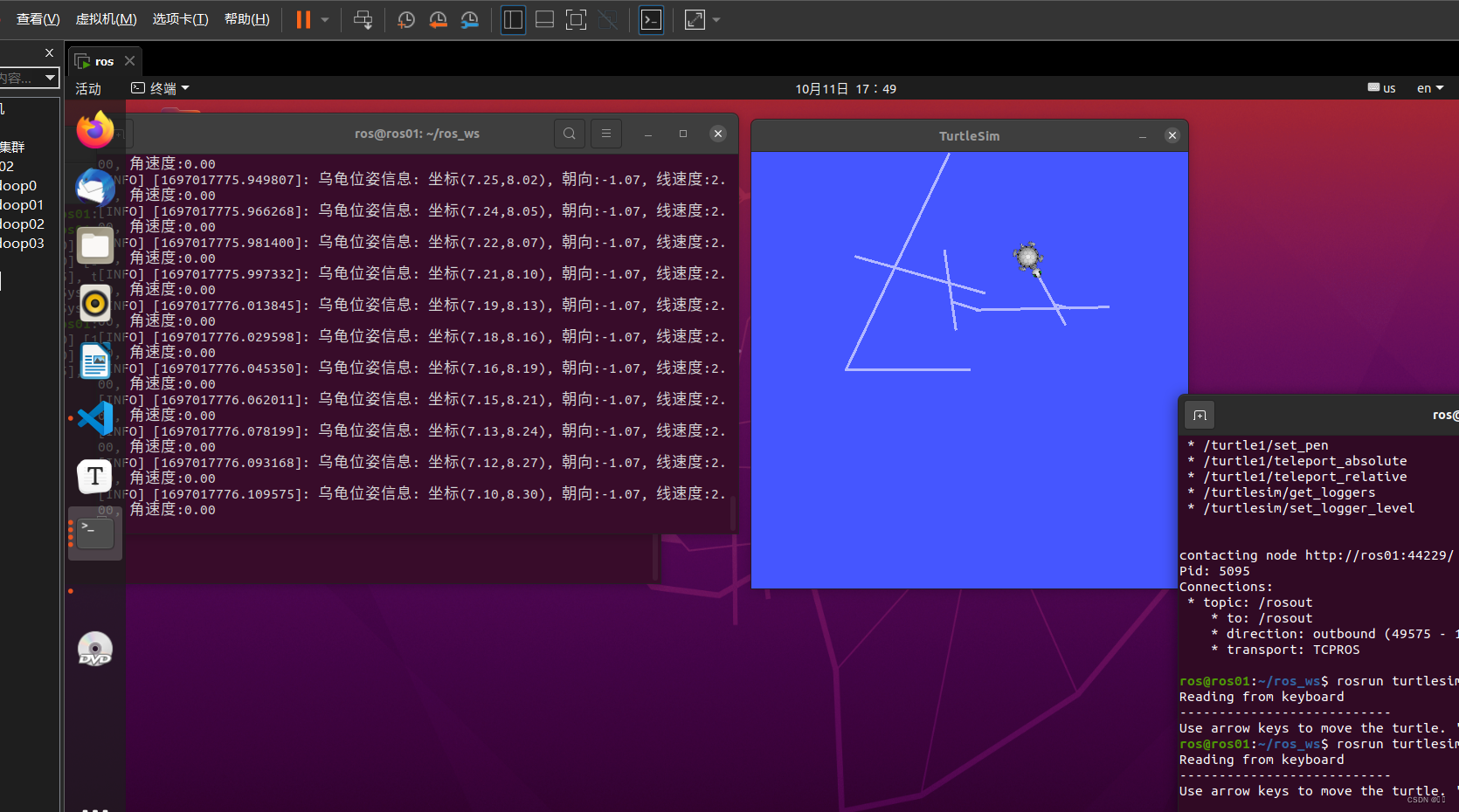
ros之乌龟做圆周运动and订阅乌龟的位姿信息
一 .基于乌龟显示节点,通过话题发布,编码实现控制小乌龟做圆周运动
打开终端1,进入工作空间 ros_ws
cd ros_ws启动节点(ros服务器)
roscore新开终端2,启动乌龟节点(turtlesim )
rosrun turtlesim turtl…
DJI ROS dji_sdk 源码分析|整体框架
DJI ROS dji_sdk 源码分析|整体框架launch文件CMakeLists.txtcpp文件main.cppOSDK 是一个用于开发无人机应用程序的开发工具包,基于OSDK 开发的应用程序能够运行在机载计算机上(如Manifold 2),开发者通过调用OSDK 中指定的接口能够…
ros_rtsp订阅Image类型topic转换为rtsp视频流
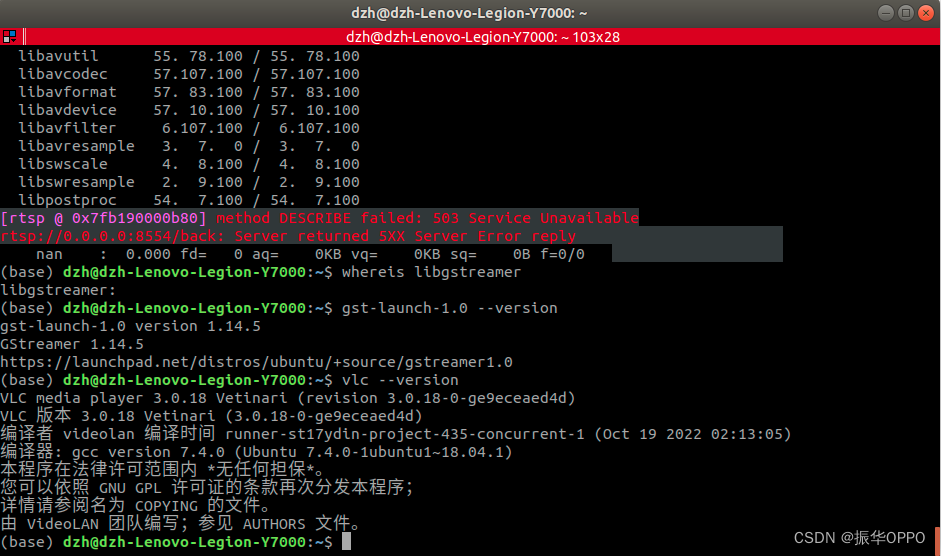
文章目录 一、安装环境二、在catkin工作空间中构建三、设置流四、推出视频流五、验证视频流1、安装vlc拉流2、安装gstreamer拉流3、安装FFmpeg拉流 一、安装环境 ROS gstreamer development libs,包括base、good、bad和rtspserver: sudo apt-get install libgstre…

ROS学习9:ROS进阶
【Autolabor初级教程】ROS机器人入门
1. action 通信 背景 机器人导航到某个目标点,此过程需要一个节点 A 发布目标信息,然后一个节点 B 接收到请求并控制移动,最终响应目标达成状态信息。乍一看好像是服务通信实现,因为需要 A 发送目标&…
MATLAB - 四旋翼飞行器动力学方程
系列文章目录 前言
本例演示了如何使用 Symbolic Math Toolbox™(符号数学工具箱)推导四旋翼飞行器的连续时间非线性模型。具体来说,本例讨论了 getQuadrotorDynamicsAndJacobian 脚本,该脚本可生成四旋翼状态函数及其雅各布函数…
使用 Python、XML 和 YAML 编写 ROS 2 Launch 文件
系列文章目录 文章目录 系列文章目录前言一、Launch 文件示例1.1 Python 版本1.2 XML 版本1.3 YAML 版本 二、从命令行使用 Launch 文件1. Launching2. 设置参数3. 控制海龟 三、Python、XML 或 YAML: 我应该使用哪种语言?如果觉得内容不错,请…
【ROS】Nav2源码下载、编译、运行
【ROS】郭老二博文之:ROS目录
1、源码下载
1.1 源码地址
https://github.com/ros-planning/navigation2
1.2 创建工程目录
ROS2使用目录结果来管理项目,因此在下载前需要创建好目录结构:
mkdir -p ~/git/nav2/src1.3 下载
git中默认版本是main。本人的开发环境为Ubun…
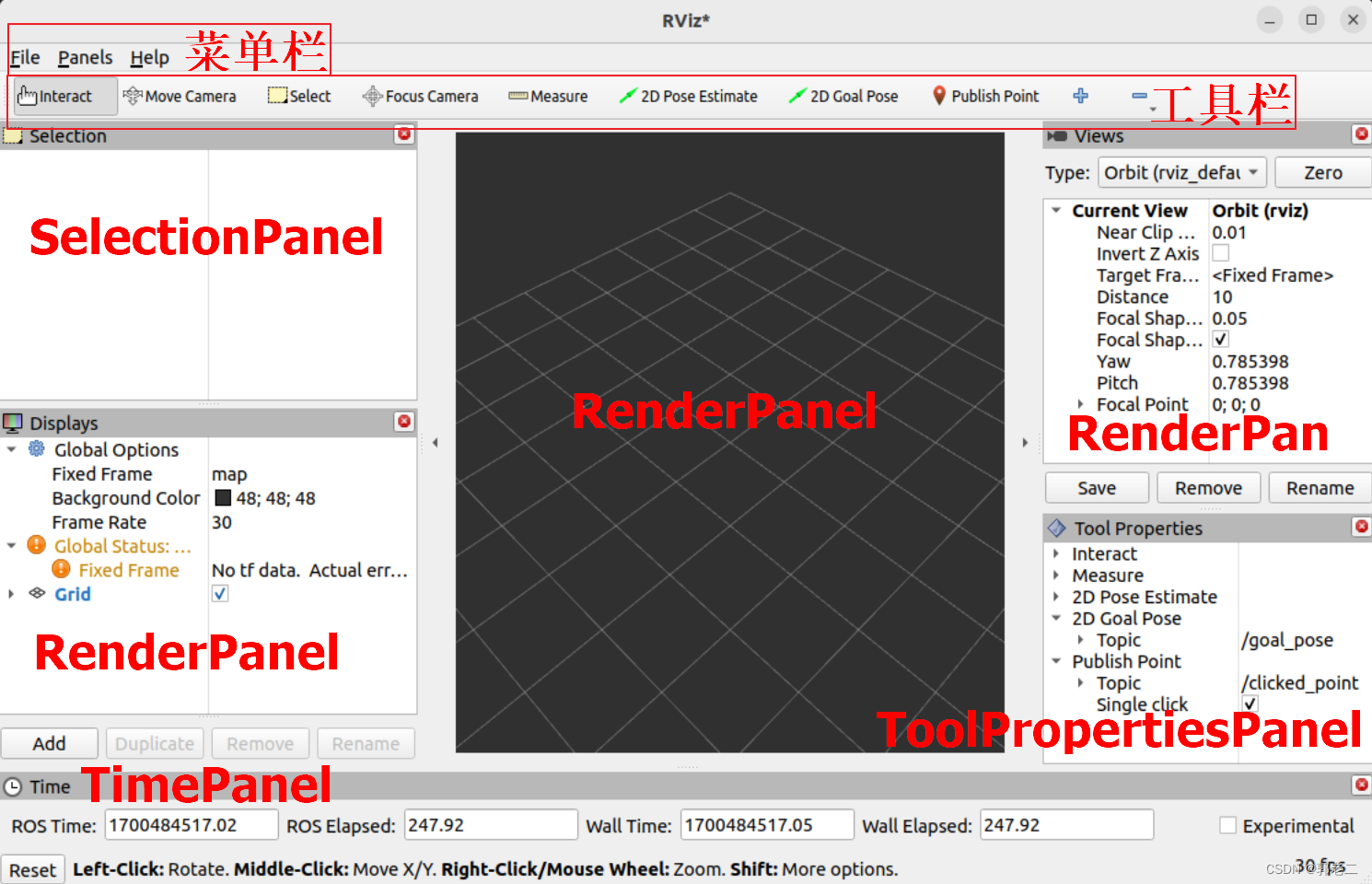
【ROS】RViz2源码分析(一):介绍
【ROS】郭老二博文之:ROS目录
1、简述
1)源码下载 源码下载参见本人博客:【ROS】RViz2源码下载、编译、运行
2)根目录列表
~/git/rviz2/src/rviz$ tree -L 1
.
├── docs
├── LICENSE
├── README.md
├── rviz2
├── rviz_assimp_vendor
├── rviz_commo…
ROS2 与 Gazebo 联合仿真项目模版
系列文章目录 文章目录 系列文章目录前言一、包含的软件包二、安装2.1 安装要求2.2 作为模板使用 三、用法3.1 安装依赖项3.2 构建项目3.3 source 工作空间3.4 启动仿真 四、详细用法4.1 软件包结构4.2 仿真资源配置 总结 前言
一个集成了 ROS 2 和 Gazebo 模拟器的模板项目。…

【开源】基于Qt5的ROS1/ROS2人机交互软件(支持地图编辑/多点导航)
本项目基于Qt5开发,基于CMake进行构建,可以实现一套代码同时在ROS1/ROS2系统中使用(本项目已接入CI,保证多ROS版本/系统版本可用性) 项目地址: https://github.com/chengyangkj/Ros_Qt5_Gui_App
软件在编译时会自动识别环境变量中的ROS1/ROS…

【ROS】RViz2源码分析(三):核心类VisualizerApp
【ROS】郭老二博文之:ROS目录
1、简述
VisualizerApp包含了三个主要的功能: QApplication:程序中主要调用app_->processEvents()来处理刷新界面,处理闪屏VisualizationFrame:窗口类都在此;RosClientAbstractionIface包含rclcpp::Node:代表ROS节点2、VisualizationF…
MATLAB - 使用 MPC Designer 线性化 Simulink 模型
系列文章目录 前言
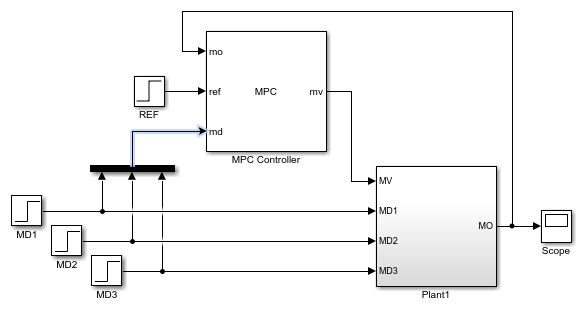
本主题介绍如何使用 MPC Designer 对 Simulink 模型进行线性化。为此,请从包含 MPC 控制器块的 Simulink 模型打开该应用程序。本例中使用 CSTR_ClosedLoop 模型。
open_system(CSTR_ClosedLoop) 在模型窗口中,双击 MPC 控制器模块。…
环境配置:Ubuntu18.04 ROS Melodic安装
前言
不同版本的Ubuntu与ROS存在对应关系。
ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司Willow Garage合作的Switchyard项目。2012年,ROS团队从…
修改后的carrot_planner
一个稍微修改了一些的carrot_planner, 用于搭配ftc_local_planner使用, 刚开始接触ROS的路径规划, 目前还相当不成熟, 希望大佬们可以提出宝贵意见!
修改如下
原始global_plan中包含的点, 只有起点, 终点及其相应位姿, 现在做了插值, 并将这一连串的pose发布到/move_base_nod…
机器人控制的开源优化库 Model-based Optimization for Robotics - Optimization Tools
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD 前言
开源的库和工具箱 一、开源的库和工具箱 …
机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SNOPT 前言
机器人ÿ…
MATLAB - 机器人关节空间运动模型
系列文章目录 前言
关节空间运动模型描述了在闭环关节空间位置控制下机械手的运动,在关节空间运动模型(jointSpaceMotionModel)对象和关节空间运动模型块中使用。
机器人机械手是典型的位置控制设备。要进行关节空间控制,需要指…
IEEE 机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SNOPT 前言
机器人ÿ…
仿真机器人-深度学习CV和激光雷达感知(项目2)day04【简单例程】
文章目录 前言简单例程运行小海龟仿真启动节点查看计算图发布 Topic调用 Serviece 用 Python 发布和接收 Topic创建工作空间创建功能包,编译编写 Topic Publisher 节点编写 Topic Subscriber 节点运行节点 自定义消息类型用 Python 注册和调用 Serviece新建功能包在…

ROS URDF、rviz、gazebo(1)
文章目录 1.URDF优化_xacro:1.1.xacro语法:1.2.xacro之launch集成: 2.arbotix控制机器人运动:2.1.编写arbotix配置文件:2.2.配置launch文件:2.3.向话题发布信息: 3.URDF集成gazebo:3.1.创建功能包并导入相关…
如何在ROS2中创建package
文章目录 打开终端:设置环境:创建新的工作空间:使用ros2 pkg create命令创建软件包:构建你的软件包:编辑你的软件包:重复构建和测试: 打开终端:
打开一个新的终端窗口。
设置环境&…
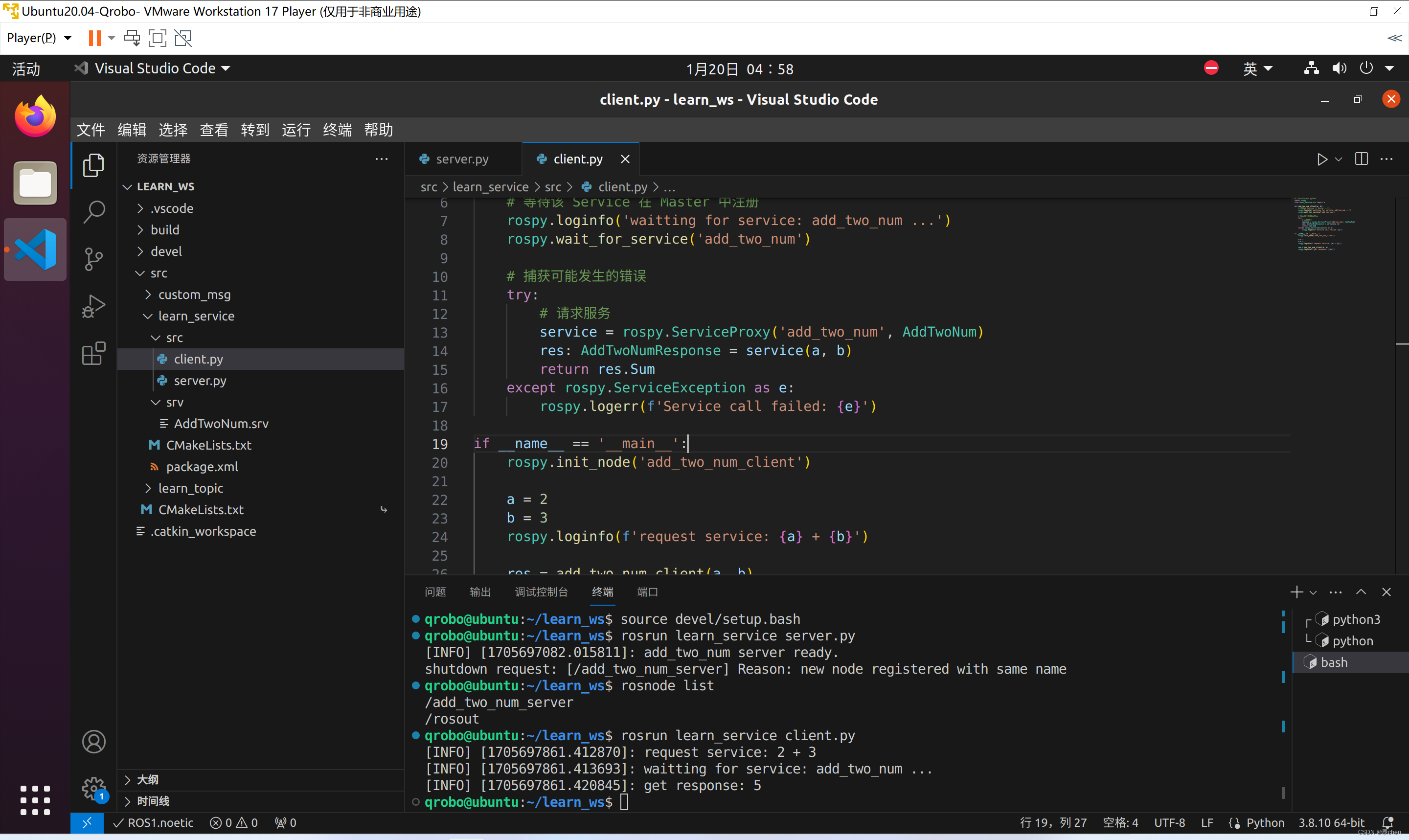
ros rviz基础操作 绘制线条 显示tf 显示odom
ROS
当先所有代码的git仓库 https://gitee.com/tianxiaohuahua/upper_computer_rviz
一、基础
1.创建工作空间 catkin_ws
创建src文件,放置功能包源码:
mkdir -p ~/catkin_ws/src进入src文件夹:
cd ~/catkin_ws/src初始化文件夹&#x…

曲线生成 | 图解贝塞尔曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 贝塞尔曲线的应用2 图解贝塞尔曲线3 贝塞尔曲线的性质4 算法仿真4.1 ROS C仿真4.2 Python仿真4.3 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法…
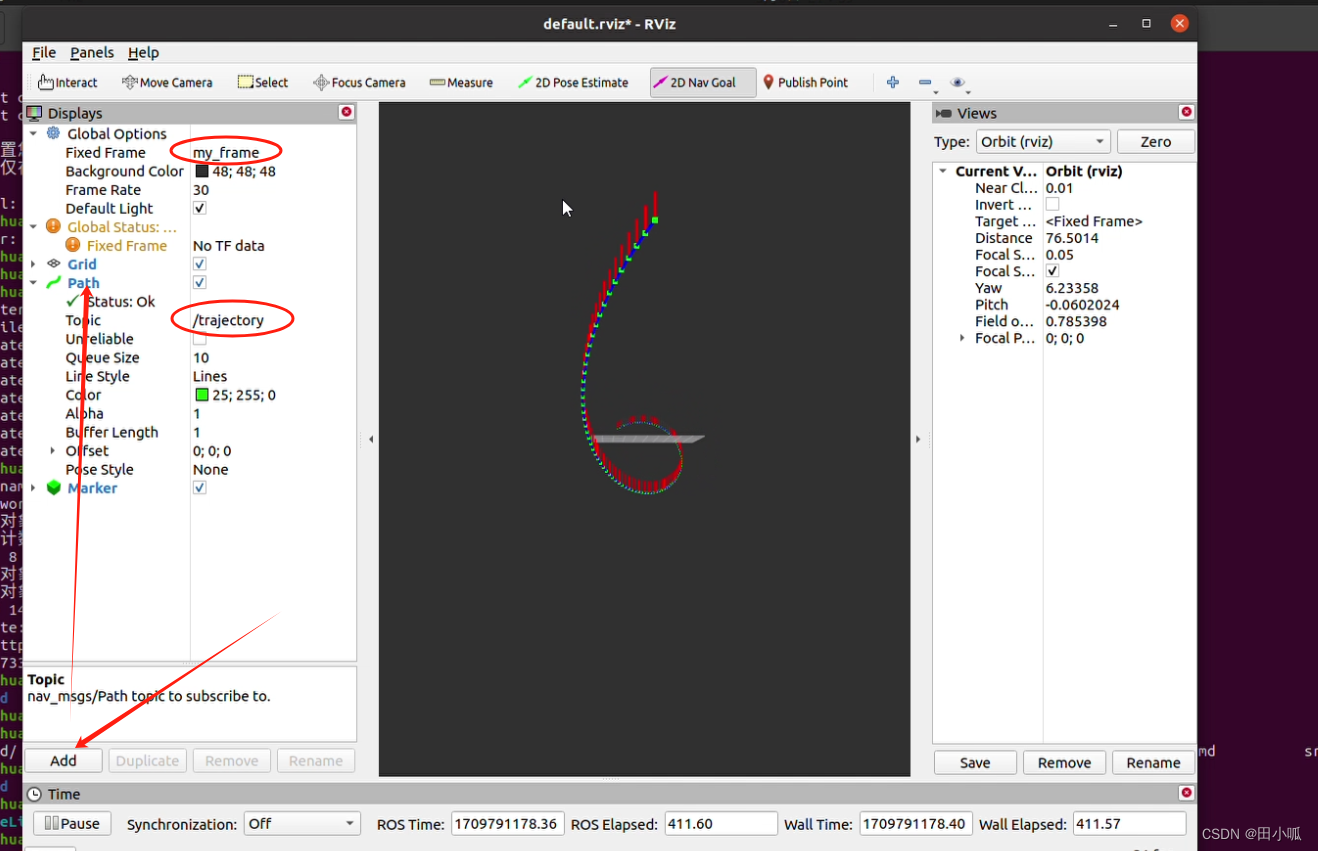
ubuntu20.04安装ros并配置相关环境以及驱动AUBO i5机械臂
ubuntu20.04安装ros并配置相关环境以及驱动AUBO i5机械臂 安装ros安装rosdep(小鱼的rosdepc,又快又好用)环境配置下载并编译aubo roslib库环境变量配置aubo gazeboaubo rviz驱动真实机械臂 安装ros
搜索鱼香ros网站https://fishros.com/,根据一键安装ros里提供的指…

ROS TF坐标变换 - 静态坐标变换
目录 一、静态坐标变换(C实现)二、静态坐标变换(Python实现) 如前文所属,ROS通过广播的形式告知各模块的位姿关系,接下来详述这一机制的代码实现。
模块间的位置关系有两种类型,一种是相对固定…

ROS TF坐标变换 - TF树
目录 一、TF树介绍二、TF2与TF三、构建TF树四、rviz查看TF坐标关系 一、TF树介绍
在机器人系统中,存在运动学模型和动力学模型。对于刚体机器人,动力学模型基于刚体动力学,代表机器人系统在运动过程中力/力矩与其运动状态的变化关系。而运动…

如何使用 ChatGPT 进行编码和编程
文章目录 一、初学者1.1 生成代码片段1.2 解释功能 二、自信的初学者2.1 修复错误2.2 完成部分代码 三、中级水平3.1 研究库3.2 改进旧代码 四、进阶水平4.1 比较示例代码4.2 编程语言之间的翻译 五、专业人士5.1 模拟 Linux 终端 总结 大多数程序员都知道,ChatGPT …

Robot Operating System 2: Design, Architecture, and Uses In The Wild
Robot Operating System 2: Design, Architecture, and Uses In The Wild (机器人操作系统 2:设计、架构和实际应用) 摘要:随着机器人在广泛的商业用例中的部署,机器人革命的下一章正在顺利进行。即使在无数的应用程序和环境中,也…
ros2不同版本的差异 foxy galactic humble rolling
ros2不同版本的差异 foxy galactic humble rolling
ROS2的每个版本都有其特点和改进。以下是关于Foxy, Galactic, Humble和Rolling版本的一些关键差异:
Foxy Fitzroy (2020-06-05)
针对LTS(长期支持)版本,支持时间为3年。 引入…
基于ROS开发的开源项目
基于ROS (Robot Operating System) 开发的开源项目很多,其中一些已经在机器人领域内非常知名。以下是一些比较著名的例子: Autoware: Autoware 是一个开源的自动驾驶车辆的软件栈,提供了从3D地图表示、环境感知(如障碍物、行人检测…
Jetson Orin NX 开发指南(8): Mavros 的安装与配置
一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,…

ROS:ROS的一些基本命令行
目录 一、打开小海龟1.1终端,启动ROS Master:1.2终端2,启动小海龟仿真器:1.3终端3,启动海龟控制节点: 二、查看系统中的计算图三、节点命令3.1查看节点下的命令rosnode3.2显示节点列表rosnode list3.3查看节…
解决nav2_bringup tb3_simulation_launch.py 无法启动Gazebo的问题
方法 1
断网再开gazebo. 评价: 方便且有效, 但来回联网很麻烦
参考: https://blog.csdn.net/James___H/article/details/116906217
方法 2
断网能打开是因为gazebo软件开启时会自动从网络下载模型,下载过程必然漫长, 另外你懂的, 网络问题嘛, vpn也解决不了的话…
ROS无人机初始化GPS定位漂移误差,确保无人机稳定飞行
引言: 由于GPS在室外漂移的误差比较大,在长时间静止后启动,程序发布的位置可能已经和预期的位置相差较大,导致无法完成任务,尤其是气压计的数据不准,可能会导致无人机不能起飞或者一飞冲天。本文主要是在进…

【ROS】使用vscode浏览navigation2源码时,提示:没有那个文件或目录
1、问题描述
使用vscode浏览navigation2源码时,头文件下面有波浪线,并提示:没有那个文件或目录。比如没有:geometry_msgs/msg/polygon.h
错误信息: 无法打开源文件 “geometry_msgs/msg/polygon.h” (dependency of “nav2_controller/controller_server.hpp”)C/C++(16…
轨迹规划 | 图解动态窗口算法DWA(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 动态障碍建模2 DWA基本原理2.1 采样窗口2.2 评价函数3 DWA算法流程4 仿真实现4.1 ROS C++实现4.2 Python实现4.3 Matlab实现0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等…
ROS-Ubuntu20.04安装noetic
ROS-Ubuntu20.04环境安装
1.系统和ROS版本
操作系统:Ubuntu20.04
ROS版本:ROS noetic
2.安装步骤
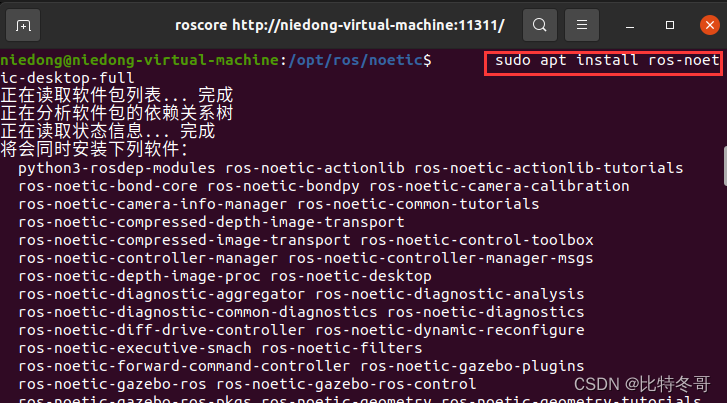
1.配置ROS软件源
sudo sh -c echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/r…

ROS学习——rviz打开bag文件
一、首先可以在这个网站中下载.bag文件用于学习。 二、显示.bag文件信息
在终端1中启动:
roscore
在终端2中输入:
rosbag info <bag_file_name> 这里要把<bag_file_name>换成你自己的bag文件名字,之后在终端就会显示出bag文件…
【ROS】RViz2源码分析(二):main函数及编译配置详解
【ROS】郭老二博文之:ROS目录
1、main函数
#include <memory>
#include <string>
#include <vector>#include <QApplication>
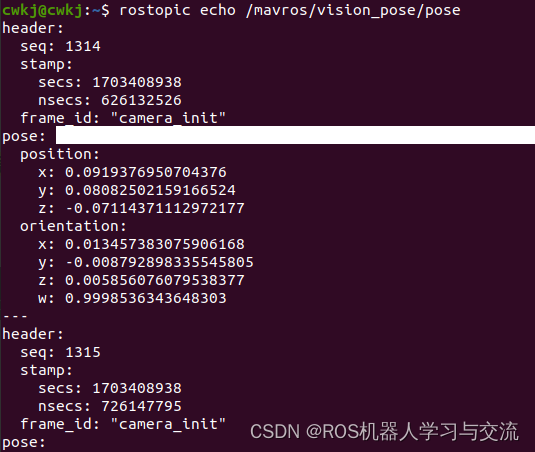
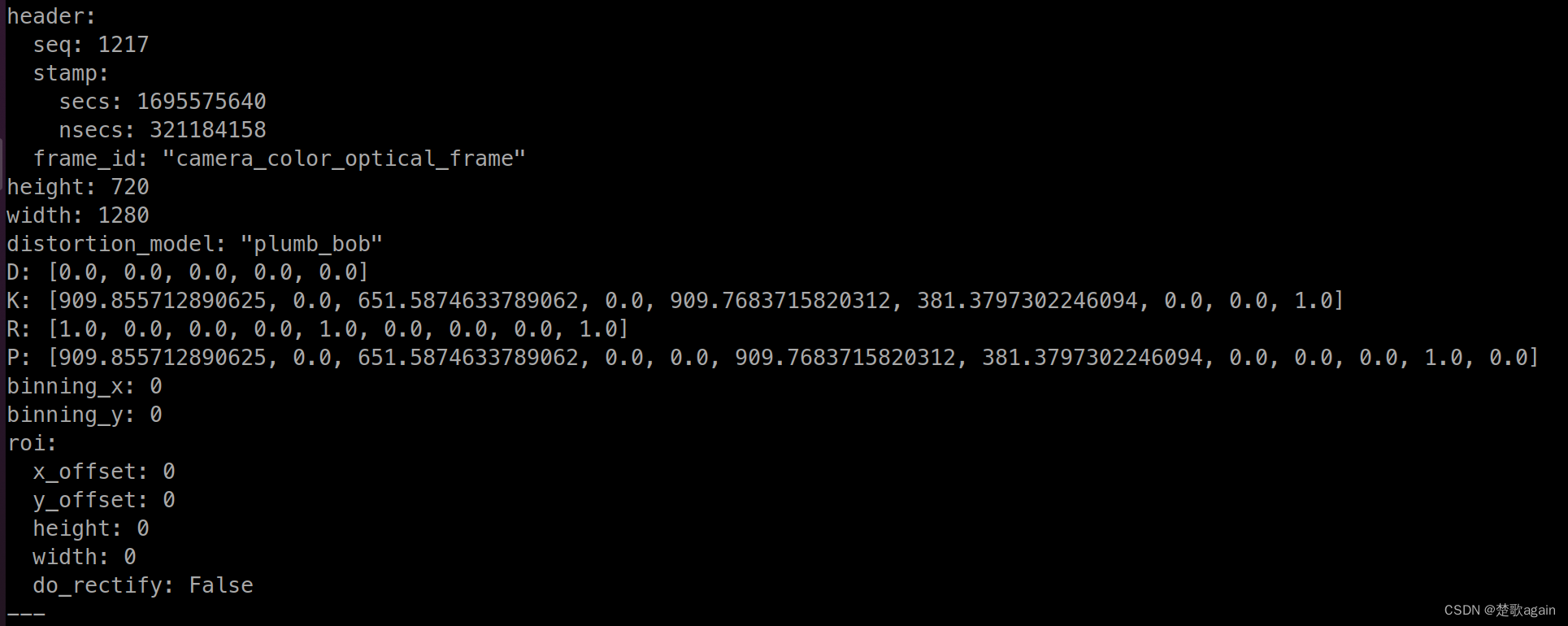
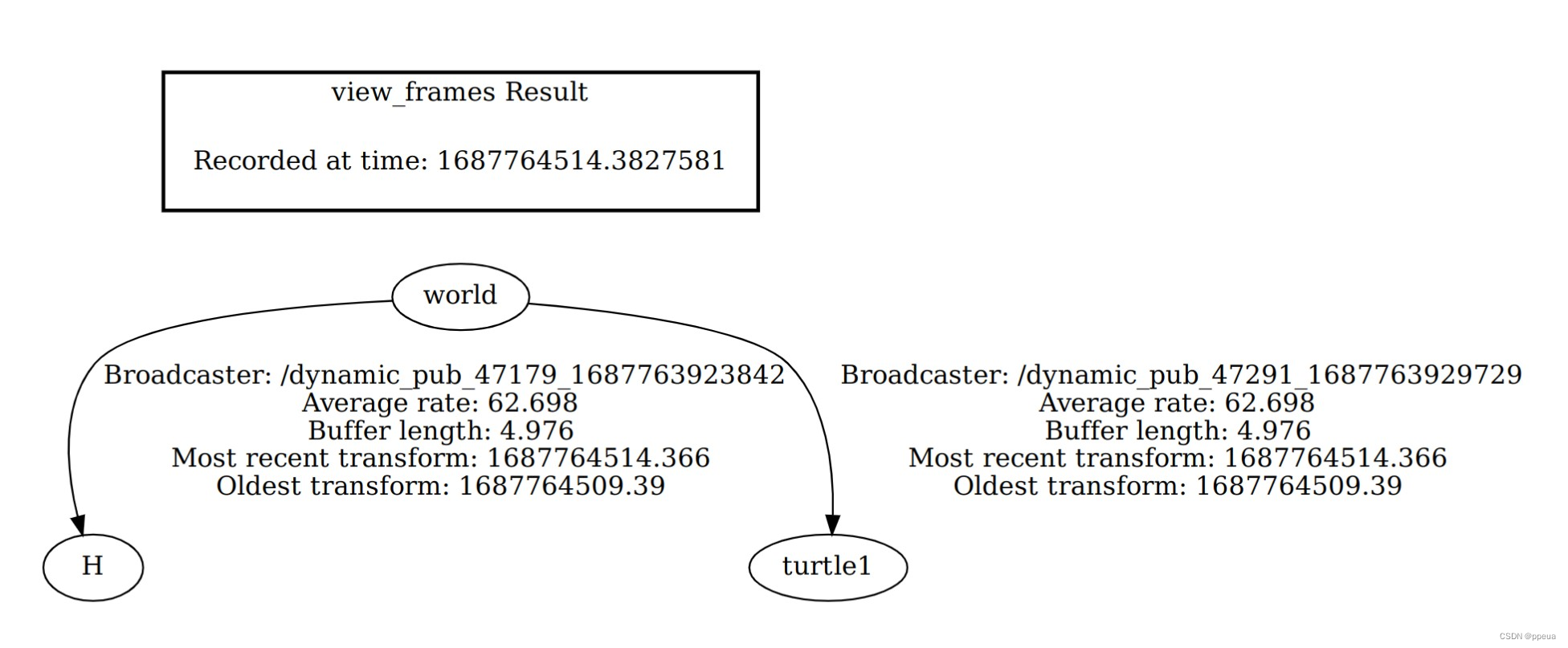
机器人操作系统ROS(十一):ROS时间戳与年月日时分秒毫秒格式转换
机器人操作系统ROS(十一):ROS时间戳与年月日时分秒毫秒格式转换 ROS时间戳转换为年月日时分秒毫秒格式C示例Python示例 年月日时分秒毫秒转换为ROS时间戳格式C示例python示例 ROS时间戳转换为年月日时分秒毫秒格式
在ROS(机器人操…
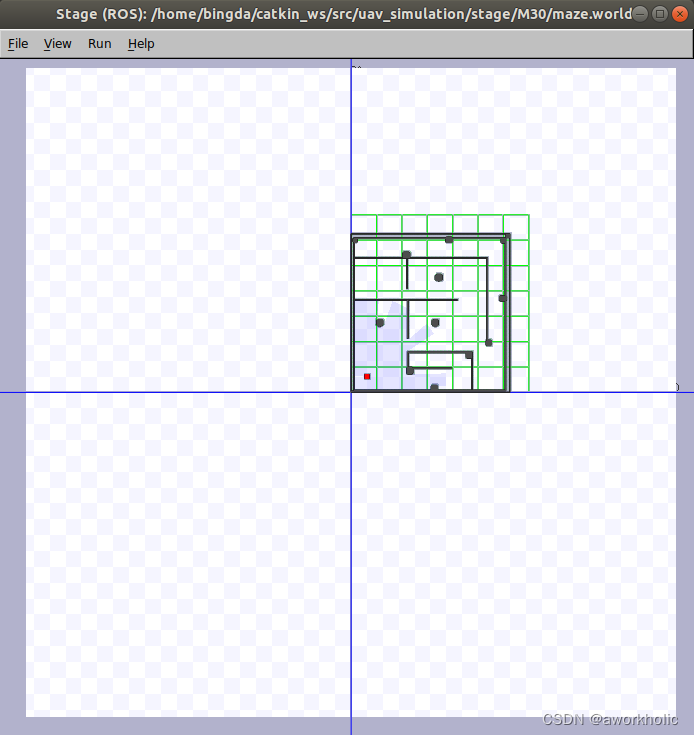
dji uav建图导航系列(三)模拟建图、导航
前面博文【dji uav建图导航系列()建图】、【dji uav建图导航系列()导航】 使用真实无人机和挂载的激光雷达完成建图、导航的任务。
当需要验证某一个slam算法时,我们通常使用模拟环境进行测试,这里使用stageros进行模拟测试,实际就是通过模拟器,虚拟一个带有传感器(如…

3 ROS1通讯编程提高(1)
3 ROS1通讯编程提高3.1 使用VS Code编译ROS13.1.1 VS Code的安装和配置3.1.1.1 VS Code以及插件安装3.1.1.2 VS Code配置ROS1工作空间3.1.1.3 VS Code运行ROS1的方法3.1.1.3 参考资料3.1.2 使用VScode编译C文件3.1.3使用VScode编译Python文件3.2 ROS1动作编程3.2.1 动作编程模型…
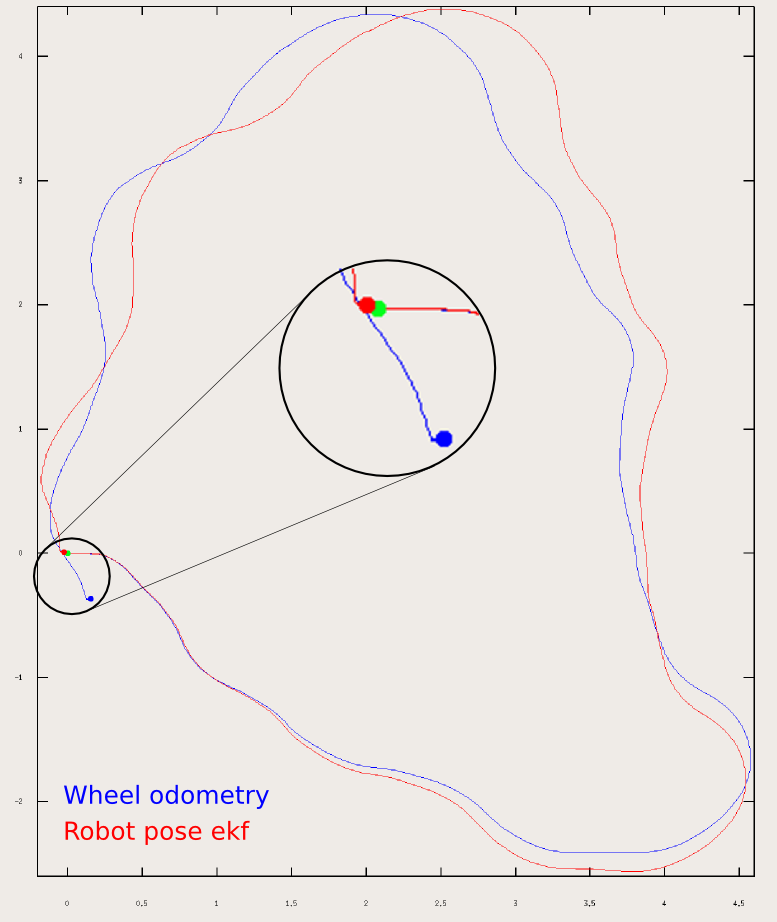
ROS EKF 机器人位姿估计功能包:robot_pose_ekf 详解
ROS EKF 机器人位姿估计功能包:robot_pose_ekf 详解 功能包使用文件结构配置参数 订阅的话题具体代码轮速里程计惯导数据视觉里程计 发布的话题robot_pose_ekf 的工作原理 功能包使用
文件结构 没有launch文件夹,有两个launch文件都在外面没有config文件…
qt.qpa.xcb: could not connect to display 0
问题
docker中启动rviz有问题 $ rviz qt.qpa.xcb: could not connect to display 0 qt.qpa.plugin: Could not load the Qt platform plugin “xcb” in “” even though it was found. This application failed to start because no Qt platform plugin could be initialize…
机器人学环境配置(VM-16 + Ubuntu-20.04 + ROS-noetic)
目录
一、安装好 VMware Pro 16(基于win11)
1. 下载
2. 安装过程
二、成功配置Ubuntu20.04.6
1. 下载
2. 新建虚拟机进行配置
3. 安装操作系统镜像
4. 更改Ubuntu软件源
5. Windows与Ubuntu跨系统复制粘贴
三、成功配置与Ubuntu20.04对应的ROS
1. 按ctrl+alt+t打…
开源七轴myArm协作机械臂正逆运动学技术讲解
引言: 在本文中,我们将深入探讨机器人学的两个核心概念:正运动学和逆运动学。这两个概念是理解和控制机械臂运动的基础。通过一个具体的7轴机械臂实例,我们将详细介绍如何计算机械臂的正运动学和逆运动学。我们首先会解释正运动学…

ros 机器人系统设计、urdf机器人建模
目录
机器人的定义
机器人的组成
移动机器人系统构建
传感器的使用
urdf 机器人建模
建模实践 机器人的定义
自动执行工作的机器装置。可以根据预先编写的程序或者接受人类指挥来行动,最终目标是使其能够脱离人的干预,根据以人工智能技术制定的原…
ROS2中如何从欧拉角转换成四元素
ROS1中使用from tf.transformations import quaternion_from_euler导入quaternion_from_euler()即可调用。而ROS2中默认没有安装,需要单独安装一下ros-galactic-tf-transformations(我使用的ROS2是galactic,根据版本名不同做相应修改即可):
…
实时最优控制(Real-Time Optimal Control)工具
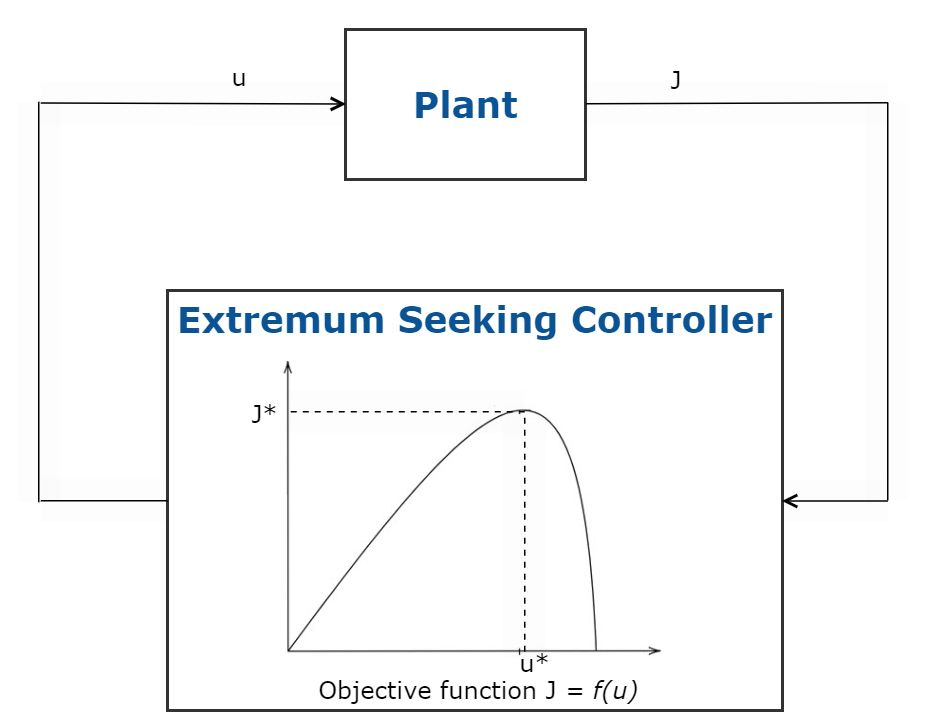
系列文章目录 前言
许多现代控制方法,如模型预测控制(model-predictive control),在很大程度上依赖于实时解决优化问题。特别是,高效解决优化控制问题的能力使复杂机器人系统在实现高动态行为(highly dyna…

在ubuntu20.04环境安装noetic ROS
1、设置软件源
配置如图软件源
2、配置源
2.1 添加源
sudo sh -c echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list或者
sudo sh -c . /etc/lsb-release && echo "deb http…
基于Pixhawk和ROS搭建自主无人车(文章链接汇总)
目前更新完第一篇,剩下内容持续更新中… 基于Pixhawk和ROS搭建自主无人车(一):底盘控制篇基于Pixhawk和ROS搭建自主无人车(二):自动航线篇基于Pixhawk和ROS搭建自主无人车(三&#x…

Jetson Orin NX 开发指南(9): MAVROS 的安装、配置与运行
一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,…

SLAM学习笔记002
严格意义上讲,ROS只是一套通信框架而已ros的几个特性:
元操作系统分布式通信机制松耦合软件框架丰富的开源功能库等
ros实际上是运行在ubuntu上的亚操作系统,或者说软件框架。但提供硬件抽象、函数调用、进程管理这些类似操作系统的功能ros…
[ROS]yolov8部署ROS
Yolov8是一种基于PyTorch深度学习框架的轻量级目标检测算法,具有高效、准确和快速的特点,因此在机器人领域得到了广泛的应用。而ROS(Robot Operating System)是一个用于机器人软件开发的框架,提供了各种工具和库&#…
【ROS软件】ROS2-humble安装navigation2与使用
Part 0. 准备
安装gazebo sudo apt install ros-humble-gazebo-* 测试gazebo: ros2 launch gazebo_ros gazebo.launch.py
Part 1. [安装] 直接安装Navigation2
下载与安装:
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-na…
曲线生成 | 基于多项式插值的轨迹规划(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 多项式插值2 多项式插值轨迹规划3 算法仿真3.1 ROS C++仿真3.2 Python仿真3.3 Matlab仿真0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化…

ROS中使用摄像头的问题
一、前言
在ROS下常用的主要有两种驱动包:usb_cam和uvc_cam
我这里用的是usb_cam包
第一次使用首先要安装这个包,安装完了之后就可以很方便的运行摄像头节点了
二、安装usb_cam包
首次使用需要下载安装usb_cam包
这里参考博客:How to U…
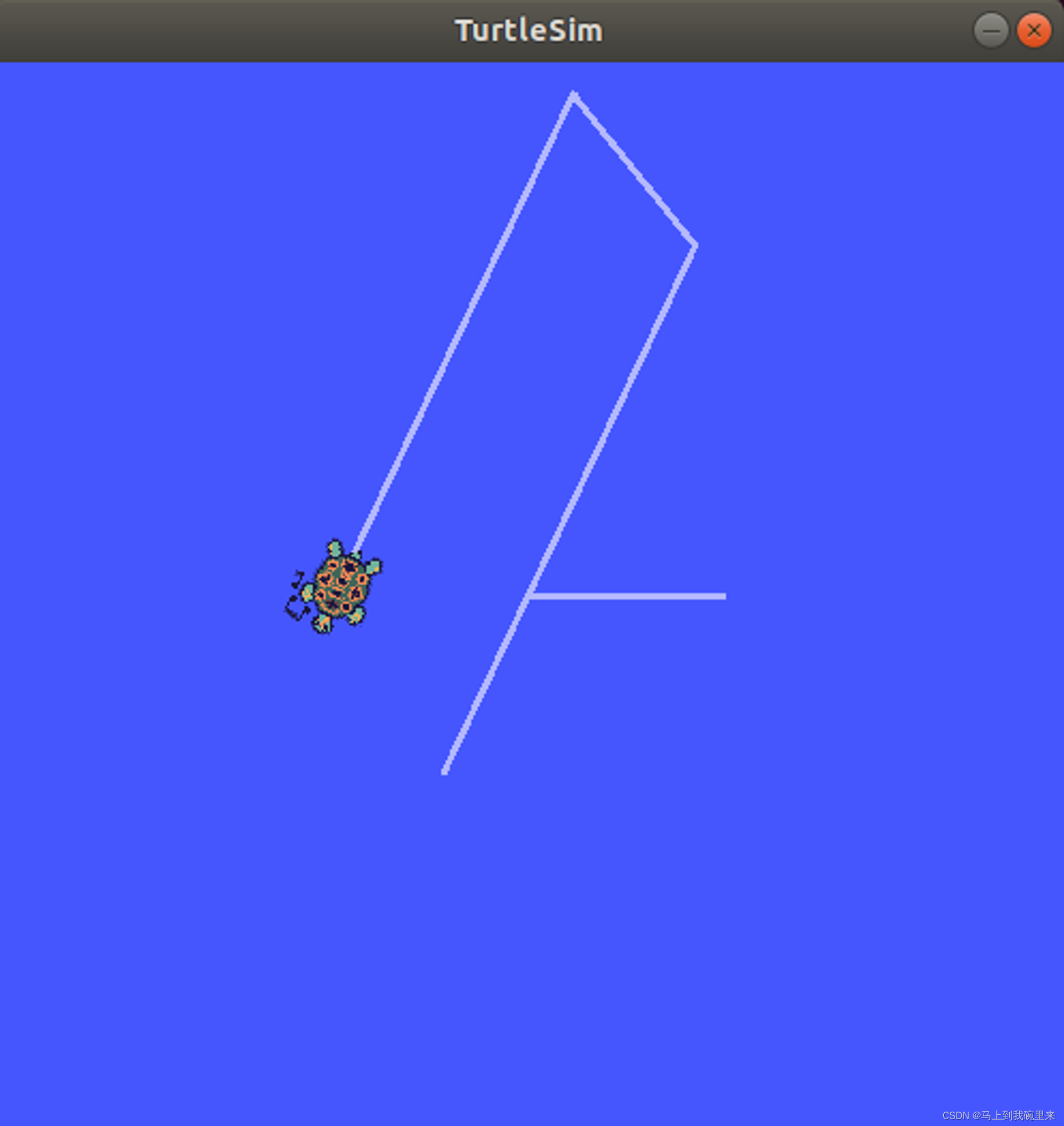
编程实现ROS话题通信——手撕 turtlesim 节点
一、实验任务 任务要求如下:使用 C 编程实现1个ROS节点,订阅 turtlesim 例程中 turtle_teleop_key 节点发出的消息,并将此消息进行一定的转换后(自行定义,如将数值按适当比例缩小、运动方向变换等)…
orin Ubuntu 20.04 配置 Realsense-ROS
librealsense安装
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
sudo apt-get install ros-noetic-ddynamic-reconfiguresudo apt-key a…
第 2 课 ROS 系统安装和环境搭建
第 2 课 ROS 系统安装和环境搭建
1.版本选择
不同的 Ubuntu 安装的 ROS 版本不同,其中 Ubuntu18.04 的 ROS 对应版本为Melodic。
Ubuntu版本ROS版本Ubuntu16.04KineticUbuntu18.04MelodicUbuntu20.04Noetic
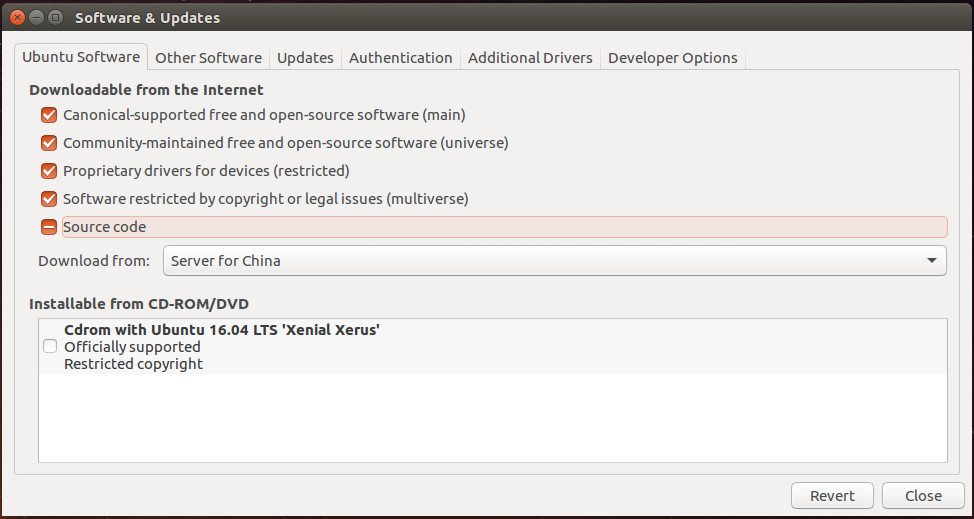
2.检查 Ubuntu 的软件和更新源
找到系统中的“软件和…
超维空间S2无人机使用说明书——61、ROS无人机4G远程控制
4G模块使用说明
引言:为了实现对无人机的远程控制,我们采用了4G通信的方案,该方案需要硬件以及相关软件的支持。4G通信是可选择功能,请确认无人机型号是否选配了4G通信。
一、4G通信方案
我们的4G通信主要通过两种方式实现&…
仿真机器人-深度学习CV和激光雷达感知(项目2)day8【作业2与答案2】
文章目录 前言作业2答案2前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容 🌟 预置知识:基本Python语法,基本linux命令行使用 以下的几个专栏是本人比较满意的…

ROS实现消息发布器和订阅器
关于ROS的教程,官网上有很完整的介绍。
英文版http://wiki.ros.org/ROS/Tutorials
中文版http://wiki.ros.org/cn/ROS/Tutorials
但是笔者在按照教程实现的时候由于需要反复修改CMakeLists.txt以及package.xml,总是出现一些问题。现在把笔者从头开始实…
crazyswarm下载编译和使用问题整理
本文写于2021.12.6 最近一次更新为2023.1.5
目录
项目简介
安装步骤
编译报错解决
使用注意 项目简介
crazyswarm版本对应commit为 4d6ca47b085227fbc893479894001d1c7ceab5cc
crazyswarm项目地址
GitHub - USC-ACTLab/crazyswarm: A Large Quadcopter SwarmA Large Qu…
从零开始搭建一个moveit2简单机械臂模型
文章目录 前言一、设计一个简单机械臂二、构造创建文件关系CMakeLists.txt 修改增加如下:package.xml 修改增加如下:urdf.rviz 全文如下:demo.launch.py 全文如下: launch rviz构造link构造joint 总结 前言
在网上搜了许多文章&a…

在仿真环境下基于数据包和RGB-D相机运行ORB_SLAM2功能包
目录
1、仿真环境
2、安装功能包及其依赖
3、功能演示 ORB_SLAM是基于特征点的实时单目slam功能包,发布于2015年。翌年,作者又发布了支持Monocular(单目)、RGB-D(深度)、Stereo(双目)摄像头的…

autoware.ai感知随笔--地面滤波
autwoware.ai中点云预处理–points_preprocessor points_preprocessor cloud_transformer: 点云坐标转换,将输入的点云转化为velodyne坐标系下的点云。 compare_map_filter: 对比激光雷达点云和点云地图,然后提取(或去除)一致的点。
|input_…
一文学会配置Fanuc控制柜端ROS2驱动
文章目录 前言一、RobotGuide是什么?二、实现步骤创建机器人工作单元导入程序TP程序Karel程序 构建程序配置控制柜配置机器人控制柜通讯配置可同时运行程序数量配置ROS_RELAY变量配置ROS_STATE变量设置启用标志 三、测试机器人状态反馈机器人命令接收整体运行测试 总…
监控系统与gpu调用
watch -n 1 nvidia-smiarm架构下的torch安装 1.查看arm域控 cuda 版本 nvcc -V 出现cuda版本cuda已完成安装 2.下载archconda a)命令sh Archiconda3-0.2.3-Linux-aarch64.sh b)可能bash会报错 sudo gedit ~/.condarc 查看 将export行显示conda安装路径留着把报错的行删掉 c)可能…
bash: /opt/ros/kinetic/setup.bash: 没有那个文件或目录
有时候打开终端的时候,会在第一行报错:
bash: /opt/ros/kinetic/setup.bash: 没有那个文件或目录
bash: /opt/ros/melodic/setup.bash: 没有那个文件或目录
bash: /opt/ros/neodic/setup.bash: 没有那个文件或目录
凡是类似报错与bash有关的…

路径规划 | 图解Lazy Theta*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 Theta*算法局限性2 Lazy Theta*算法原理3 Theta* VS. Lazy Theta*4 仿真实现4.1 ROS C实现4.2 Python实现4.3 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图…
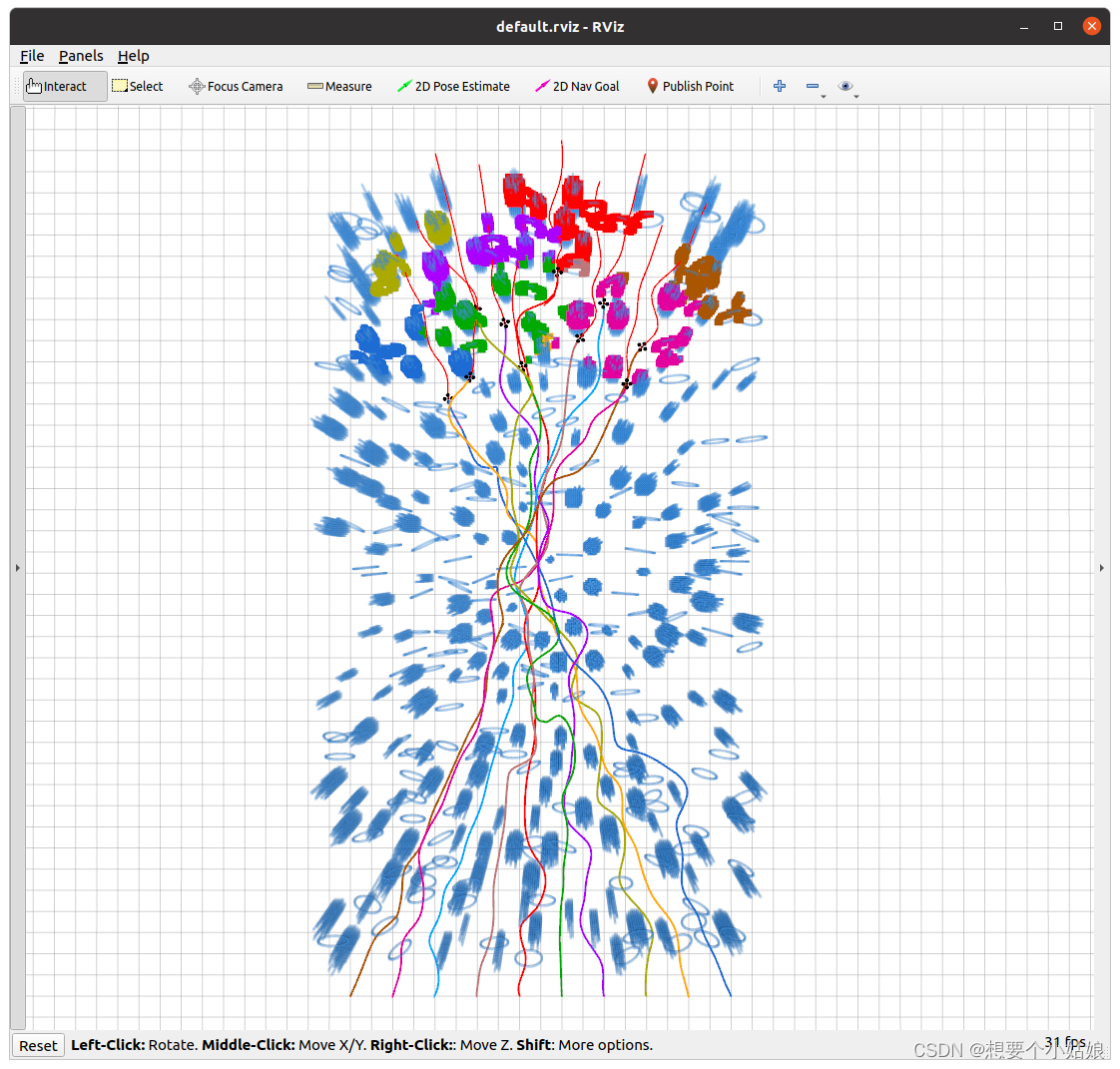
ROS 和 Gazebo 模拟器实现未知环境探索的快速探索随机树算法
ROS 和同步定位和映射
ROS 最流行的应用之一是 SLAM(同步定位和映射)。 移动机器人中 SLAM 的目标是借助连接到机器人的可用传感器构建和更新未探索环境的地图,该传感器将用于探索。
快速探索随机树算法
快速探索随机树 (RRT) 是一种数据结…
Raspberry Pi 上 ROS 服务器/客户端通过GPIO 驱动硬件
ROS 服务
现在,想象一下你在你的电脑后面,你想从这个服务中获取天气。
你,在你身边,被认为是客户端,在线天气服务是服务器。您将能够通过带有 URL 的 HTTP 请求访问服务器。将 HTTP URL 视为 ROS 服务。
首先&#…

ROS无人机开发常见错误
飞控部分
一、解锁时飞控不闪红灯,无任何反应,地面站也无报错
解决办法:
打开地面站的遥控器一栏
首先检查右下角Channel Monitor是否有识别出遥控各通道的值,如果没有,检查遥控器是否打开,遥控器和接收…
ROS笔记二:launch
目录
launch
node标签
参数
参数服务器
节点分组 launch
launch文件是一种可以可实现多节点启动和参数配置的xml文件,launch文件用于启动和配置ROS节点、参数和其他相关组件。launch文件通常使用XML格式编写,其主要目的是方便地启动ROS节点和设置节点之间的连…
kitti2bag 工具的安装
在github上有人开源了kitti转rosbag的一个工具,我们在安装时不需要下载源码。
错误示范:
1. pip install pykitti
2. pip install kitti2bag
我在执行命令的时候失败有两个原因
下载很慢导致最后下载失败。
pandas 下载失败。
原因和解…

ROS中简单实现讯飞星火大模型API调用
文章目录 前言一、申请试用二、ROS中使用1.配置环境变量2.编写ros功能包总结前言
讯飞星火认知大模型是由科大讯飞自主研发的认知智能大模型,通过学习海量的文本、代码和图像,具备跨领域的知识和语言理解能力,能基于自然对话方式理解和执行任务。目前开放了API接口供用户使…
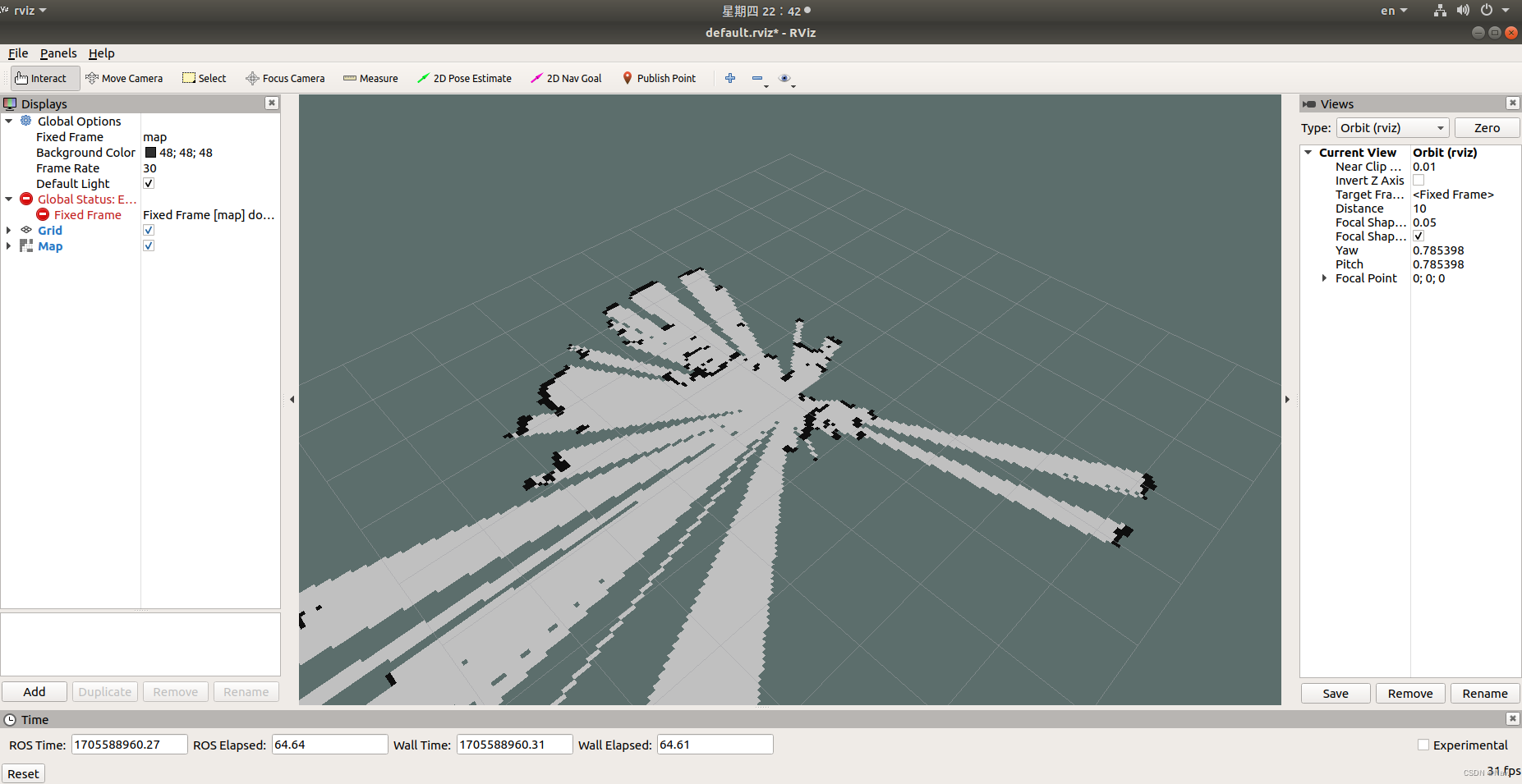
ROS---机器人导航实现
ROS—机器人导航实现
1 准备工作
1.1 分布式架构
需要完成分布式框架的搭建并且能正常运行,在PC端可以远程登录机器人端。
1.2 功能包安装
在机器人端安装导航所需功能包:
安装 gmapping 包(用于构建地图):sudo apt install ros-<ROS版本>-g…
![ubuntu_定制文件系统[2]-清理日志log](https://img-blog.csdnimg.cn/direct/be408504585f479f82cbfe1c8ffb91b8.png)
ubuntu_定制文件系统[2]-清理日志log
1.问题现象
系统长时间运行, 产生大量的系统日志 ubuntu/debian 系统日志如下 /var/log$ du -sh * 31M syslog # syslog日志 61M syslog.1 2.5G journal/ # systemd service日志 当日志文件过大, 硬盘空间占用100%时, 导致各种异常
命令按tab补全无响应服务/进程启动异常服务…
ROS2 control常用command命令功能及使用
文章目录 前言正文 前言
以下命令支持从命令行与 controller_manager 进行交互。它们可通过标准的ROS2 CLI框架获得。 当前支持的命令有:
ros2 control list_controllersros2 control list_controller_typesros2 control list_hardware_componentsros2 control li…
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 4
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 4 文章目录 前言一、创建controller相关二、测试运行测试forward_position_controller总结前言
本篇文章在上篇文章的基础上主要讲解双轴机器人驱动怎么编写机器人外部/内部(扭矩、压力)传感器数据反馈1,…

tf2_ros::Buffer 用法用例汇总
文章目录 tf2_ros::Buffer 的常见用法和用例代码实战package.xmlCMakeLists.txttransformlistener.cpp编译运行 tf2_ros::Buffer 的常见用法和用例
tf2_ros::Buffer 是 ROS 中用于管理变换(TF)数据的核心类之一。它允许您在 ROS 中轻松地查询、缓存和管…
ROS使用catkin_make编译单个功能包和所有功能包
编译功能包:
catkin_make -DCATKIN_WHITELIST_PACKAGES"需要单独编译的包名"但是如再次使用catkin_make编译所有功能包时会出现只编译上次设置的单独功能包,如果想要再次使用catkin_make编译所有功能包,需要执行:
cat…

曲线生成 | 图解B样条曲线生成原理(基本概念与节点生成算法)
目录 0 专栏介绍1 什么是B样条曲线?2 基函数的de Boor递推式3 B样条曲线基本概念图解4 节点生成公式 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)…
ubuntu18实现QT与ROS通信
背景介绍:老板需求:qt开发ui界面,实现与ros通讯。同伴A已经使用qt开发了部分功能,但是没有弄与ros通讯相关,与A沟通了解项目细节。当前主要任务:先实现ros与qt通讯,实现ros话题发布、接收
经验…
ROS编程Raspberry Pi机器人模型
使用机器人操作系统 (ROS) 基础设施将物理机器人连接到机器人模拟是 ROS 工程师面临的最常见挑战之一。 您将学习如何在虚拟环境中模拟机器人,并在等效的真实世界场景中实现所需的行为。
首先介绍了 Raspberry Pi机器人模型及其配备的传感器和执行器。 然后&#x…
基于2D激光雷达匹配的充电桩位姿检测
原理
1. 激光雷达滤波,滤除太远的雷达数据,并降采样
2. 对雷达数据进行分割聚类出candidates
3. 通过策略,过滤掉大部分不符合的candidates
4. 对candidates与充电桩模板数据进行PCA、ICP匹配
5. 选择距离最小或者得分最高的一帧作为输出…
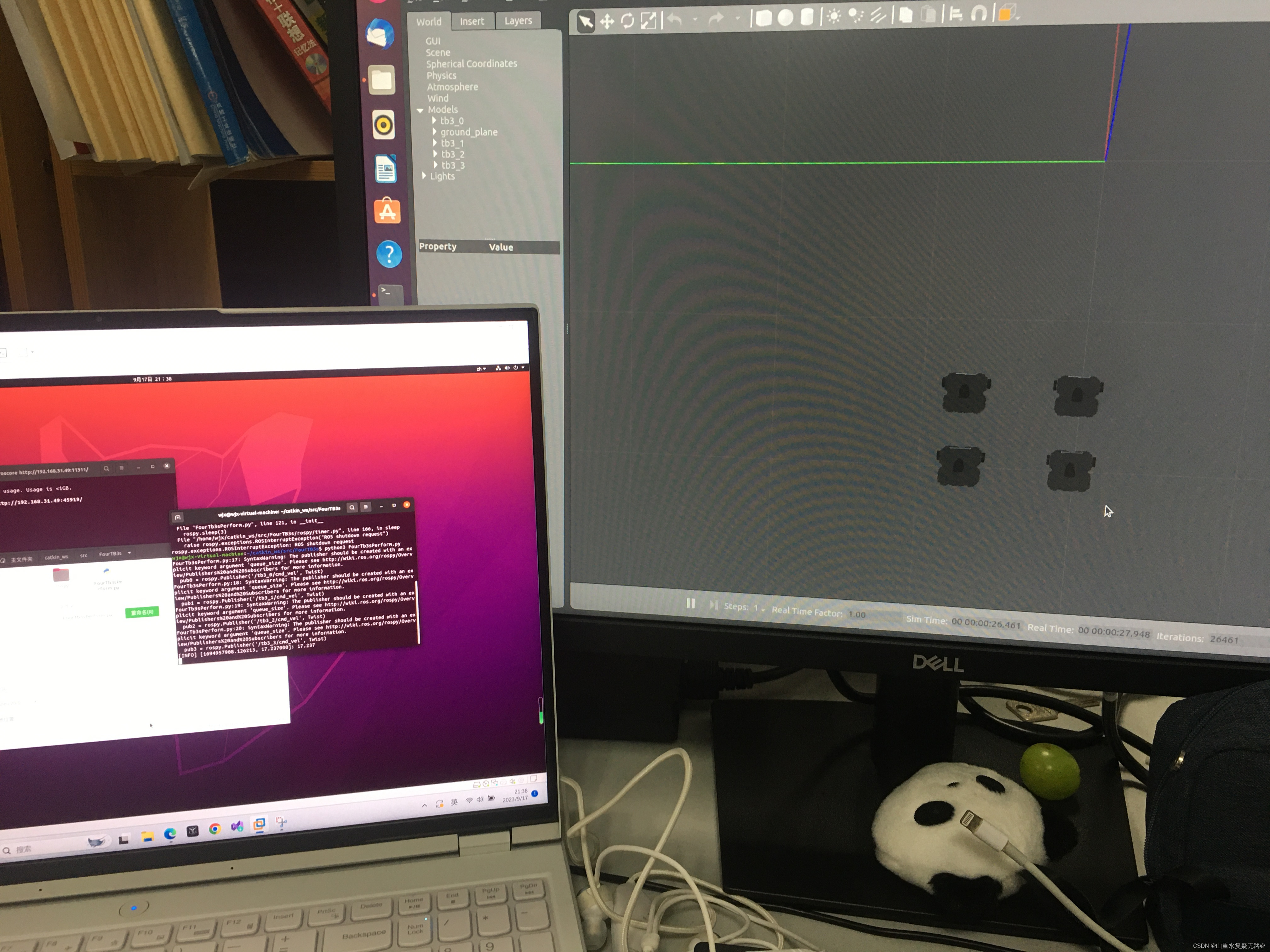
如何在Gazebo中实现多机器人编队仿真
文章目录 前言一、仿真前的配置二、实现步骤1.检查PC和台式机是否通讯成功2.编队中对单个机器人进行独立的控制3、对机器人进行编队控制 前言
实现在gazebo仿真环境中添加多个机器人后,接下来进行编队控制,对具体的实现过程进行记录。 一、仿真前的配置…
ubuntu系统下打开kinetic相机+结合上篇文章yolo
上篇文章我们实现了yolo下与本机电脑摄像头结合的物体识别;
本节我们想办法打开kinetic相机:
1. 安装我们需要的驱动:
sudo apt-get install ros-kinetic-freenect-*
rospack profile
2. 检查turtlebot默认的3D传感器的环境变量和确定输出
echo $…
防火墙过滤规则案例-从零开始学RouterOS系列04
此教程用途:
内网IP过滤:如禁止某些IP上网。
外网IP过滤:禁止访问某些外网IP。 一、内网IP过滤:如禁止某些IP上网
拓扑如下: 两台机器均可上网! 现在只允许254机器上网,不允许253机器上网。 …

双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图
双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图
昨晚完成了ROS的多机通讯,还没来得及整理相关操作步骤,在进行实际小车的实验之前,还是先打算在仿真环境中进行测试,熟悉相关的操作步骤,计划通过虚拟机&…
qtcreator-ros 安装记录
文章目录 ros_qtc_pluginros_qt_demo参考链接ros_qtc_plugin
ROS Qt Creator 插件是专门为 ROS 开发的,通过简化任务和为 ROS 工具创建集中位置来提高开发人员的效率。由于它建立在Qt Creator平台之上,用户可以访问其所有现有功能,例如:语法高亮,代码索引,编辑器(C++,…
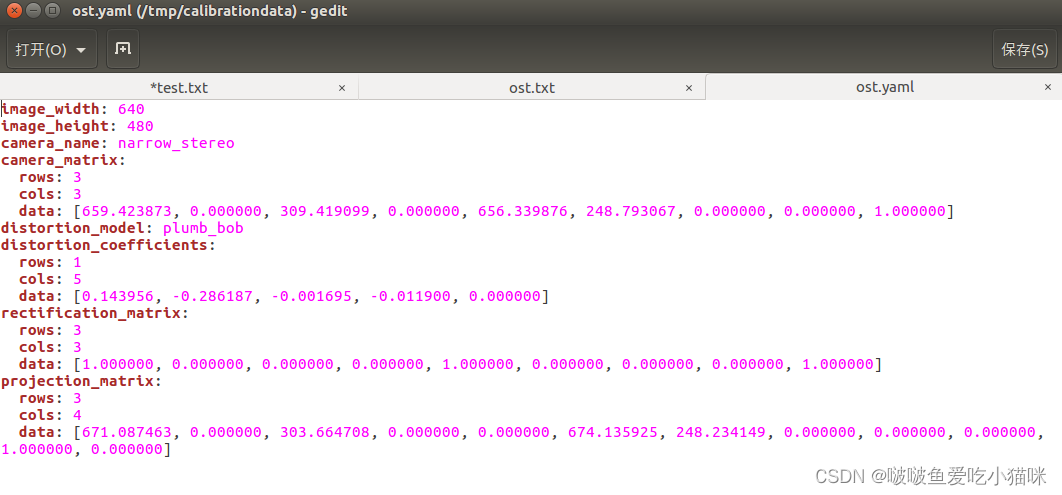
ROS学习——利用电脑相机标定
一、 安装usb-cam包和标定数据包
sudo apt-get install ros-kinetic-usb-cam
sudo apt-get install ros-kinetic-camera-calibration
要把kinetic改成你自己的ros版本 。
二、启动相机
roslaunch usb_cam usb_cam-test.launch
就会出现一个界面 可以通过下面命令查看相机…
rosbridge使用案例心得总结之_第五篇安装rosbridge接口
目录
一、在Ubuntu18.04上安装rosbridge
二、在Ubuntu20.04 上安装rosbridge
三、虚拟机上开机执行 一、在Ubuntu18.04上安装rosbridge
sudo apt-get install ros-melodic-rosbridge-serversudo apt-get install ros-melodic-rosbridge-suitesudo apt-get install ros-mel…

ROS:创建工作空间和编译功能包
目录 一、工作空间二、创建工作空间三、编译空代码的工作空间四、功能包五、创建功能包六、设置和检查环境变量七、功能包中的两个重要文件 一、工作空间
存放工程开发相关文件的文件夹。类似一个IDE(例如Pycharm)新建一个工程,就是一个工作…
ROS自定义msg类型及使用
一、创建msg消息
参考: CreatingMsgAndSrv
首先创建一个空的package单独存放msg类型(当然也可以在任意的package中自定义msg类型) 这里为便于说明,建立一个名为test_msgs的包,用于对自定义msg类型的用法举例
$ …
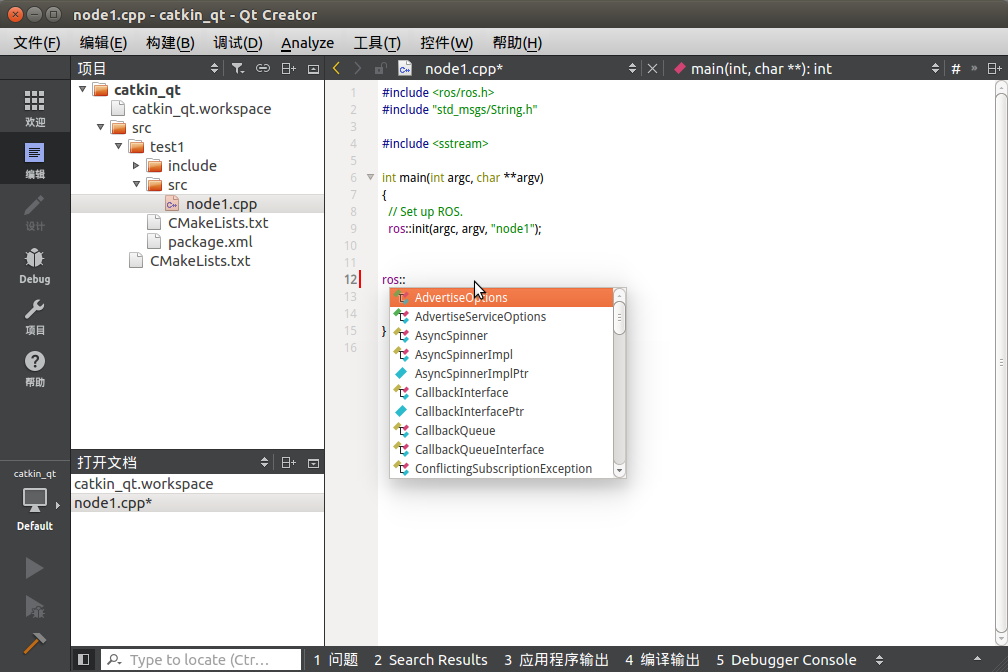
如何使用Qt插件在Qt中进行ROS开发
一、前言
本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Qt“新建项目”和“新建文件”选项中出现ROS的相关选项,让我们可以直接在Qt下创建、编译…
ROS的tf包中坐标变换的方法
1、setRotation函数的参数
在坐标变换的时候常有这样的写法: tfTutorialsAdding a frame (C)
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
br.sendTransform(tf::StampedTransform(transform,ros…
使用ROS遇到的一些小问题
1、bashrc文件设置的环境变量无效
具体表现为自己在catkin_ws空间创建的包用roscd找不到,直接运行roscore提示说网络配置不正确。
siatubuntu:~$ roscore
... logging to /home/siat/.ros/log/f973aef0-3ff4-11e5-a30c-28d244c5bb27/roslaunch-ubuntu-11487.log
C…
ROS中的turtlebot包
turtlebot包如果没有安装成功或者文件夹做了改动运行不起来需要重装就需要uninstall turtlebot了,wiki上找到的说法是:
If you ever need to uninstall, simple rm -rf /opt/turtlebot will do the trick.
不过这是groovy版本下的卸载
http://wiki.ro…

【ROS】ROS2命令行工具详解
1、简介
ROS1中每个功能都使用ros开头的命令行工具,如:roscore、rosrun等 ROS2中只有一个命令行工具ros2,各个功能模块通过参数子命令来实现
~$ ros2 -h
用法: ros2 [-h] [--use-python-default-buffering] <command> ……选项:-h, …
常用ROS工具包相关介绍
重要说明:本文从网上资料整理而来,仅记录博主学习相关知识点的过程,侵删。
一、参考资料
ROS相关技术(概念版) ROS相关技术(经验版)
二、rviz三维可视化平台
ROS学习笔记13:rviz…

【ROS】fsd_algorithm架构学习与源码分析(致敬)
😏★,:.☆( ̄▽ ̄)/$:.★ 😏 这篇文章主要介绍fsd_algorithm架构学习与源码分析。 无专精则不能成,无涉猎则不能通。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下&am…

INDEMIND相机ROS bag包数据的回放
实验需要IMU相机,跑算法是在ROS下跑,在 ROS 系统中,可以使用 bag 文件来保存和恢复系统的运行状态,比如相机话题的 bag 包,然后回放用来进行联合外参标定,也可以使用EVO工具显示算法轨迹,这里记…

ROS:launch文件演示
目录 前言一、添加launch文件夹二、新建launch文件三、编辑launch内容四、 执行文件 前言
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘…
rosbag 的常用命令
文章目录 1、录制数据包2、查看数据包信息3、数据包播放4、数据包过滤5、切割数据包 1、录制数据包
// cd到目标文件夹下
rosbag record –a // 录制所有topic的数据包,不光包括正在播的bag里有的
rosbag record /topic_a /topic_2 // 录制topic_1/topic_2的数据包
rosb…
解决nomachine扫描不出ip问题
IP扫描工具Advanced IP Scanner 快速的扫描局域网中存在ip地址以及pc机的活跃状态,还能列出局域网计算机的相关信息。并且ip扫描工具(Advanced IP Scanner)还能够单击访问更多有用的功能- 远程关机和唤醒 软件下载地址
48.在ROS中实现local planner(1)- 实现一个可以用的模板
有了之前45.在ROS中实现global planner(1)- 实现一个可以用模板的global planner的经验, 现在再去创建一个local planner的包就容易多了
1. 创建包
创建
cd ~/pibot_ros/ros_ws/src # 这里可以使用自己的ros workspace
catkin_create_pkg sample_loc…
ROS1 下载与运行Github上的ROS demo
目录 1 创建工作空间2 下载Github包到本地方法1:git方法2:下载3 编译准备3.1 安装依赖3.2 编译4 配置环境方法1:工作空间的.bash文件方法2:系统.bashrc文件5 运行ROS程序5.1 打开roscore终端5.2 执行程序1 创建工作空间
选择项目存放路径,创建工作空间,存放GitHub下
ROS学习笔记(六):TF坐标变换
ROS学习笔记(六):TF坐标变换TF的基本知识TF工具tf_monitortf_echostatic_transform_publisherview_frames创建TF广播器创建TF监听器TF的基本知识
TF是一个让用户随时间跟踪多个坐标系的功能包,它使用树形数据结构,根据…

【3D激光SLAM】LOAM源代码解析--laserOdometry.cpp
系列文章目录
【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp 【3D激光SLAM】LOAM源代码解析–laserOdometry.cpp 写在前面
本系列文章将对LOAM源代码进行讲解,在讲解过程中,涉及到论文中提到的部分,会结合论文以及我自己的理解进行解…
【multimaster_fkie】多 ros master core 通信库,不配置主从机进行 ros 多机通信
1. 简介
多个 ros 系统之间可以通过配置 ros 主从机实现互相通信,但有的场景每个 ros 系统都需要运行 rosmaster/roscore ,这种情况下就需要使用 multimaster_fkie 库来实现 ros 通信。 Github:https://github.com/fkie/multimaster_fkie RO…
木叶飞舞之【机器人ROS2】篇章_第二节、turtlebot3安装
没有真实小车的情况下,利用gazebo的仿真,操作小乌龟来学习ros2。废话不多说,直接上命令。
Install Gazebo
sudo apt install ros-humble-gazebo-*Install Cartographer
假如前一节未安装源码版本的cartographer,那就安装apt版本…
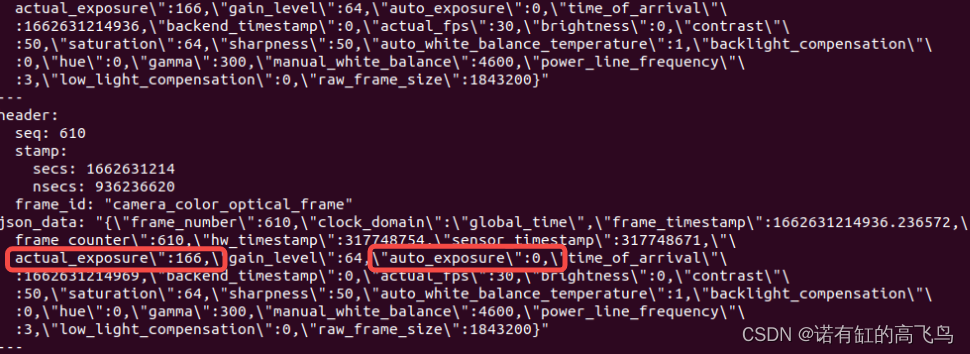
realsenseD435i ros auto_exposure设置
目录写在前面问题解决方法参考完写在前面
1、本文内容 realsense取消自动曝光设置
2、平台 linux,realsenseD435i 3、转载请注明出处: https://blog.csdn.net/qq_41102371/article/details/126767225
问题
用realsense-ros的rs_camera.launch的图像是…

rosbag相关进阶操作
一些很好用的网站
时间戳在线转换网页 旋转矩阵、四元数、绕轴旋转、欧拉角在线转换网页 四元数、欧拉角可视化在线转换网页
一、按时间截取bag
使用如下代码: rosbag filter 原始包名.bag 截取后的包名.bag "t.to_sec() > 开始时间 and t.to_sec() <…
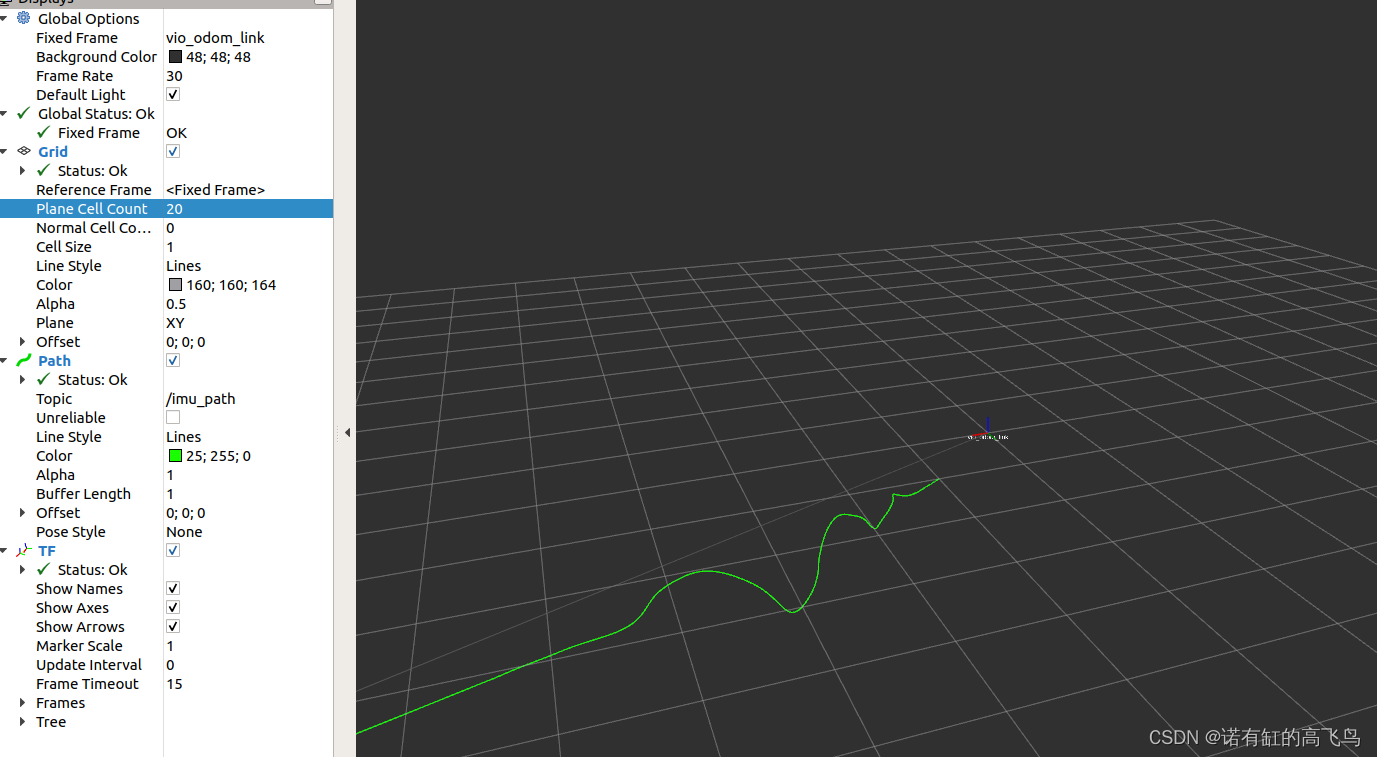
【chatgpt代码系列】激光+二维码融合定位AGV用的tf计算
Q1:已知机器人有tf关系map->robot->qr_code->qr_label,现在知道map->qr和qr_code->qr_label,robot->qr_code,->表示两个坐标系的连接关系,现在想求map->robot,如何用ros的tf库、矩…
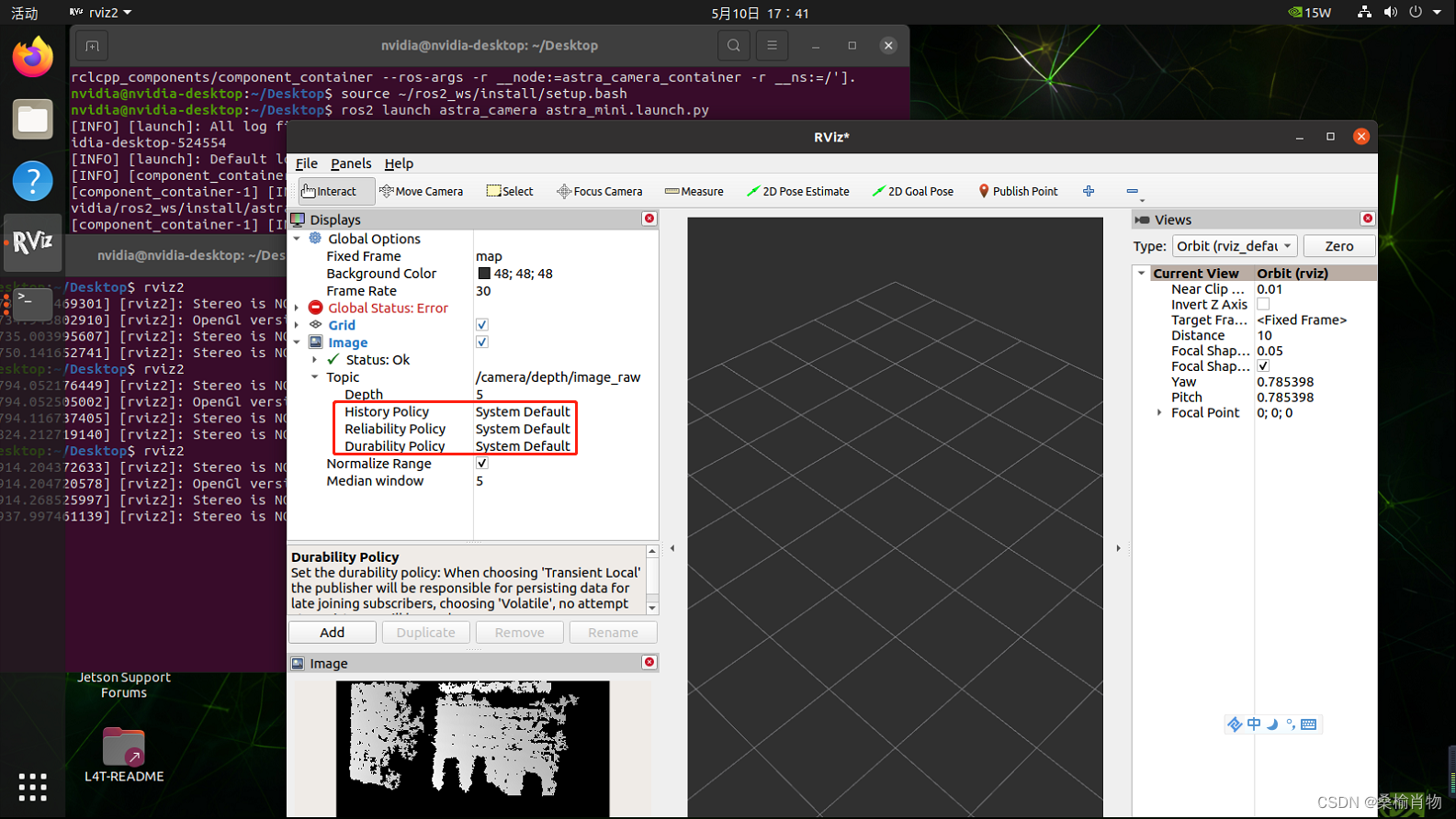
ROS2 中 使用奥比中光 Orbbec Astra Pro 深度相机
本文将以 Ubuntu 20.04 和 ROS2 foxy 环境为例,详细介绍如何在 ROS2 中使用奥比中光 Orbbec Astra Pro 深度相机。在这一篇文章中,你会学到如何创建工作空间,使用 usb_cam 功能包,编译安装使用 ros_astra_camera 等。 文章目录 1.…
Python布雷森汉姆直线算法RViz可视化ROS激光占位网格映射
使用对数赔率映射已知姿势算法(ROS 包)。
布雷森汉姆直线算法
布雷森汉姆直线算法是一种线绘制算法,它确定应选择的 n 维栅格的点,以便形成两点之间的直线的近似值。 它通常用于在位图图像中(例如在计算机屏幕上&…
Python 和 Raspberry Pi 基于 Ubuntu Core 实践 ROS 系统
我们将使用 Ubuntu Core,并在 Raspberry Pi 上安装 Ubuntu Core,使用Python 创建基于 ROS 的工作包和启动文件。
Ubutun Core 介绍和安装
Ubuntu Core 是 Ubuntu 的专门发行版,专用于适合“物联网”(IoT) 存储桶的设备。 这包括路由器、恒温…

关于单目视觉 SLAM 的空间感知定位技术的讨论
尝试关于单目视觉 SLAM 的空间感知定位技术的学习,做以调查。SLAM算法最早在机器人领域中提出,视觉SLAM又可以分为单目、双目和深度相机三种传感器模式,在AR应用中通常使用轻便、价格低廉的单目相机设备。仅使用一个摄像头作为传感器完成同步…
Python 和 Raspberry Pi 基于 Ubuntu Core 实践 ROS 系统
我们将使用 Ubuntu Core,并在 Raspberry Pi 上安装 Ubuntu Core,使用Python 创建基于 ROS 的工作包和启动文件。
Ubutun Core 介绍和安装
Ubuntu Core 是 Ubuntu 的专门发行版,专用于适合“物联网”(IoT) 存储桶的设备。 这包括路由器、恒温…
plan路径优化,路径平滑
plan路径优化,路径平滑
//欧氏距离double global_planner::euclidean_distance(const geometry_msgs::Point& p1, const geometry_msgs::Point& p2) {double dx = p1.x - p2.x;double dy = p1.y - p2.y;return std::sqrt(dx * dx + dy * dy);}
//插入中间点void glob…
ROS 编程仿真和 MATLAB 硬件原型
ROS 实践案例
Raspberry Pi 上 ROS 服务器/客户端通过GPIO 驱动硬件 Raspberry Pi 上 ROS 发布者/订阅者控制 GPIO 状态
聚焦 ROS 细节
介绍了 ROS 的基本概念之后,讨论了如何建模和模拟机器人。 Gazebo、CoppeliaSim 和 Webots 软件模拟器将用于控制建模机器人并…

ROS学习(4)——launch文件的编写
对于一个复杂的系统,会有十几个、几十个甚至是上百个节点在运行,如果我们每次都是采取“打 开终端、运行 rosrun 指令”来启动应用程序,显得效率非常低。我们需要一个更方便的方式来启动系统。ROS 中提供了“使用 launch 文件 roslaunch”命令来完成系统的启动。具体的实现方法…
Python编程ROS机器人
机器人操作系统 (ROS) 是研究和工业中最受欢迎的机器人软件框架之一。它具有多种功能,可以在机器人中实现不同的功能,而无需从头开始实现。
首先向您展示 ROS 的基础知识,以便您了解差分机器人的基础知识。 然后,您将了解机器人建…

ROS系统读取USB相机图像数据
ROS系统读取USB相机图像数据 前言usb_cam 功能包下载与编译摄像头选择连接摄像头可配置参数 前言
usb_cam功能包简介 为了丰富机器人与外界的交互方式,已经增加了与机器人的语音交互方式,不仅使机器人能够说话发声,还能听懂我们说的话&#…
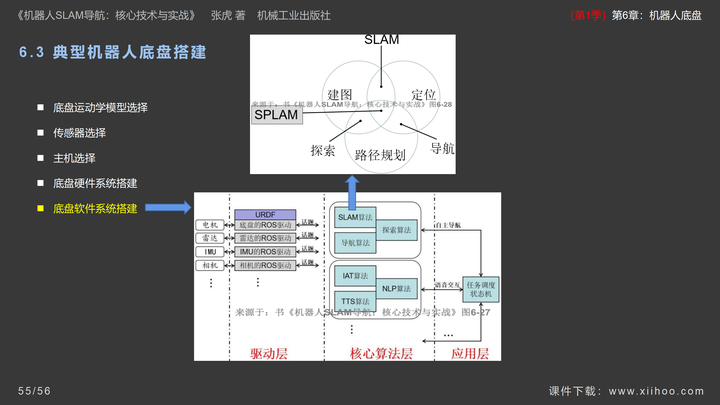
《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘
视频讲解 【第1季】6.第6章_机器人底盘-视频讲解 【第1季】6.1.第6章_机器人底盘_底盘运动学模型-视频讲解 【第1季】6.2.第6章_机器人底盘_底盘性能指标-视频讲解 【第1季】6.3.第6章_机器人底盘_典型机器人底盘搭建-视频讲解
第1季:第6章_机器人底盘 先 导 课…
ros编译报错-- Could NOT find ros_ethercat_eml (missing: ros_ethercat_eml_DIR)
– Could NOT find ros_ethercat_eml (missing: ros_ethercat_eml_DIR) – Could not find the required component ‘ros_ethercat_eml’. The following CMake error indicates that you either need to install the package with the same name or change your environment …
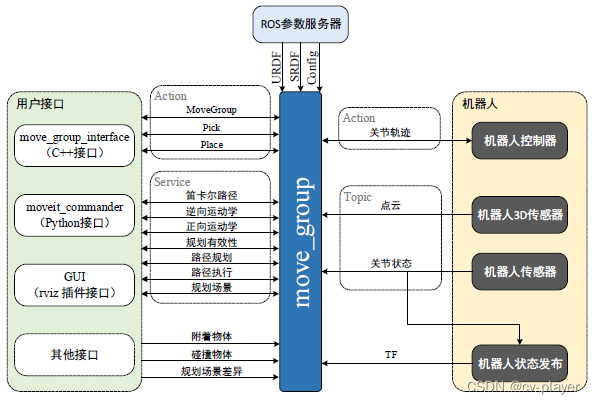
ROS学习笔记(九):MoveIt!与机械臂控制
ROS学习笔记(九):MoveIt!与机械臂控制 MoveIt!简介MoveIt!系统架构MoveIt!编程与机械臂控制关节空间规划工作空间规划笛卡尔运动规划避障规划 Pick and Place示例 MoveIt!简介
Move…
路径规划 | 图解RRT*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 图解RRT*算法原理2 ROS C++算法实现3 Python算法实现4 Matlab算法实现0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条…
四、MAVROS与机载电脑通信
MAVROS与机载电脑通信
简介:MAVROS和Jetson nano通信,设置飞控参数和MAVROS文件,实现飞控和机载电脑的通信。MAVROS相当于PX4飞控中的MAVLINK模块。MAVROS将话题转为MAVLINK格式消息发送给飞控,飞控中的MAVLINK模块将MAVLINK格式…
VSCode借助Remote-SSH扩展,远程调试linux系统的机器人
本文主要介绍使用VSCode借助Remote-SSH扩展,远程调试linux系统的机器人的方法 在我之前的文章: ROS主机搭建NFS服务器,虚拟机通过挂载访问及修改主机文件 中介绍了采用挂载到的方式进行远程调试的方法,本文将介绍另一种方法&#…

Rviz是什么以及使用实例
Rviz是一个ROS(机器人操作系统)的可视化工具,用于显示机器人的传感器数据、运动状态、地图等信息。它可以帮助用户更好地理解机器人的工作原理,调试机器人的行为,以及可视化机器人的运动轨迹等。
以下是一个使用Rviz的…

Isaac Sim详细安装使用教程
前言
笔者出于工作需要,使用ISAAC SIM,顺便也整理一份使用的教程,方便后来人少走弯路。
作者: Herman YeAuromix Auromix是一个机器人爱好者组织,欢迎参与我们Github上的开源项目
一、安装Isaac Sim
1.下载omniver…

北科天绘 16线3维激光雷达开发教程
文章目录前言一、配置IP地址二、ROS Driver1.创建工作空间并初始化2.启动雷达驱动程序三、 RVIZ 显示 R-Fans 点云数据前言
本教程使用的是三维激光雷达为北科天绘的R-Fans-16,采用网口连接传输数据,9-36V供电。 Ubuntu版本为20.04,Ros版本为Neotic。 !…
ROS笔记(6)——自定义消息类型
在ROS中,可以使用自定义消息类型来表示应用程序中使用的特定数据类型。自定义消息类型可以用于发布和订阅ROS主题,也可以用于ROS服务和ROS动作等。下面是在ROS中创建自定义消息类型的步骤: 1.创建消息目录
首先,需要创建一个包含…
ROS常见问题 | Unable to convert from SDF version 1.7 to 1.6
文章目录 环境复现BUG原因解决环境
Ubuntu 18.04LTS ROS Melodic
复现
打开Gazebo并加载.world类型文件
BUG
Unable to convert from SDF version 1.7 to 1.6原因
无法将SDF的版本从1.7改到1.6
解决
①找到你加载的.world类型文件 ②修改.world类型文件中的sdf version…
ROS学习笔记(二):计算图、节点、rosnode、rosrun与roslaunch
ROS学习笔记(二):计算图、节点、rosnode、rosrun与roslaunch计算图ROS节点rosnoderosrunroslaunchroslaunch简介roslaunch标签\<launch\>:根元素\<node\>:启动节点\<include\>:嵌套复用\…
ROS话题queue_size的含义与设置技巧
ROS1中发布和订阅话题时,都需要设置queue_size,参考:
roscpp/Overview/Publishers and Subscribers - ROS Wiki
rospy/Overview/Publishers and Subscribers - ROS Wiki
1. 发布话题
# roscpp
ros::Publisher publisher nh.advertise<…

ROS小车研究笔记4/1/2023:研究文章Detecting Glass in Simultaneous Localisation and Mapping
原文出处 article{Wang201797, title “Detecting glass in Simultaneous Localisation and Mapping”, journal “Robotics and Autonomous Systems”, volume “88”, pages “97 - 103”, year “2017”, issn “0921-8890”, doi “http://dx.doi.org/10.1016/j.rob…
尝试对MoveIt2的轨迹进行插值控制舵机机械手
1.现状分析
机械手在运动时,要尽可能平稳、少冲击,显得丝滑。 Moveit给到的轨迹,除了描述了各个关键时刻的各个关节的位置,还描述了此时的各个关节的速度、加速度。假如我们的执行机构可以完全按照这些位置、速度、加速度来进行操…

关于ROS机器人-文心一言和CatGPT怎么看-
交流截图: 文字版本如下(W-文心;C-猿如意):
如何通过蓝桥云课学习ROS机器人?
W:
如果你想通过蓝桥云课学习ROS机器人,可以按照以下步骤进行:
确认ROS机器人的版本和教…
rosbag相关操作
一些很好用的网站
时间戳在线转换网页 旋转矩阵、四元数、绕轴旋转、欧拉角在线转换网页 四元数、欧拉角可视化在线转换网页
一、按时间截取bag
使用如下代码: rosbag filter 原始包名.bag 截取后的包名.bag "t.to_sec() > 开始时间 and t.to_sec() <…
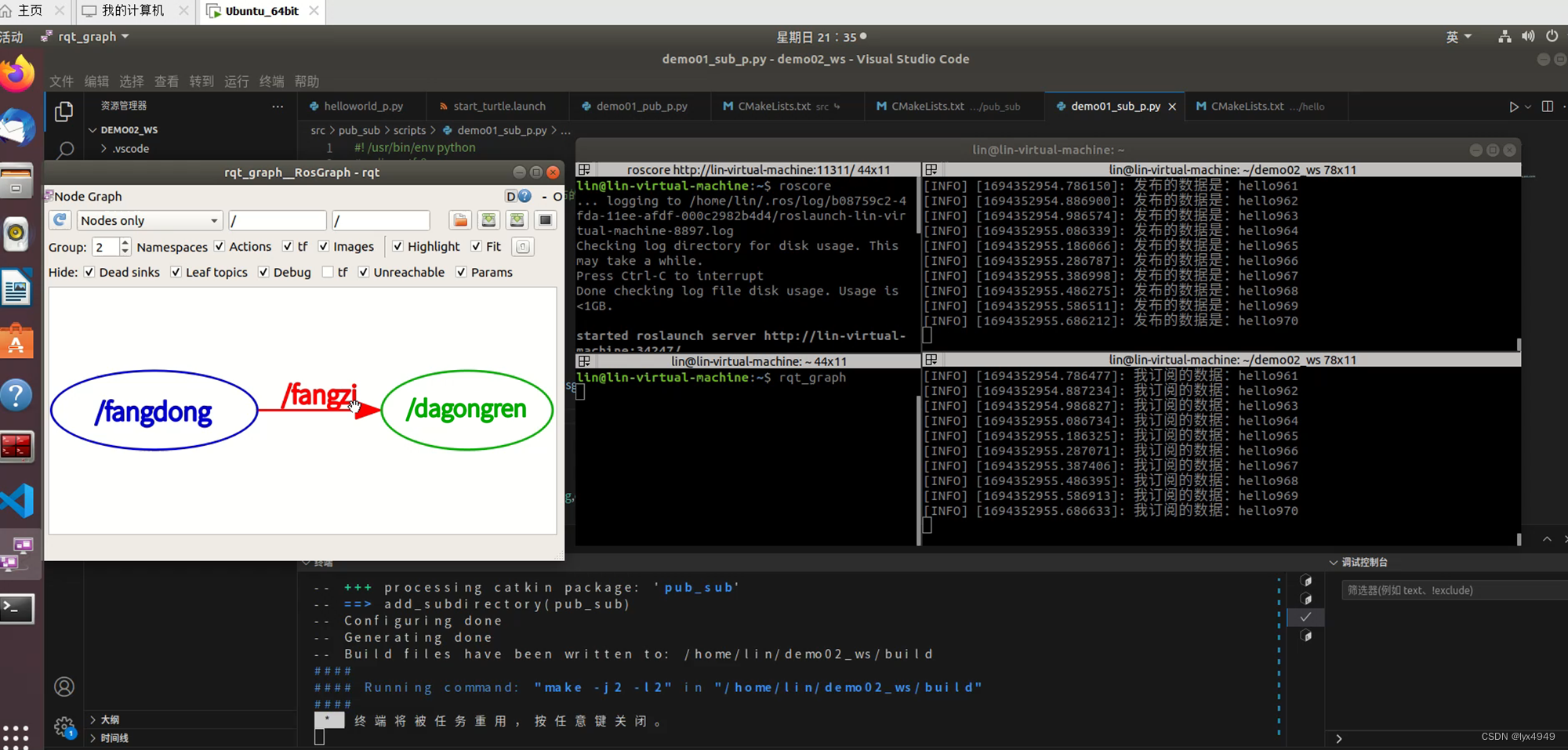
ROS学习笔记(五)---话题发布
1. 话题通信是什么
在ROS(机器人操作系统)中,话题通信是一种常用的通信机制,用于在不同的ROS节点之间传递消息。话题通信基于发布者-订阅者模式,其中一个节点(发布者)发布消息到一个特定的话题…
基于百度AI在ROS上实现人体检测功能
关于百度AI网站上的操作和之前关于人脸识别部分的操作一样,注意要在人体识别部分再重新建立一个应用,并且获得
APP_ID API_KEY SECRET_KEY
这三个关键值。
#! /usr/bin/python
# Copyright (c) 2015, Rethink Robotics, Inc.# Using this CvBri…

ROS中topic重映射理解及验证(remap标签)
先附上个人总结: remap在node标签<node> ... </node>之外的作用域是其之后的所有节点; <node> ... </node> <!-- 不受remap影响 -->
<remap />
<node> ... </node> <!-- 受remap影响 -->rema…

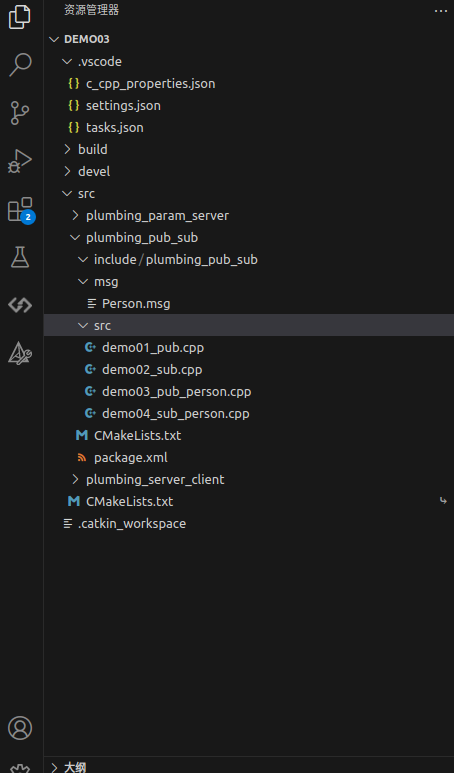
ROS入门-第 1 章 ROS概述与环境搭建
目录
第 1 章 ROS概述与环境搭建
1.1 ROS简介
1.1.1 ROS概念
1.1.2 ROS设计目标
1.1.3 ROS发展历程
1.3 ROS快速体验
1.3.1 HelloWorld实现简介
1.3.2 HelloWorld(C版)
步骤 1:创建工作空间
步骤 2:创建发布者节点
步骤…
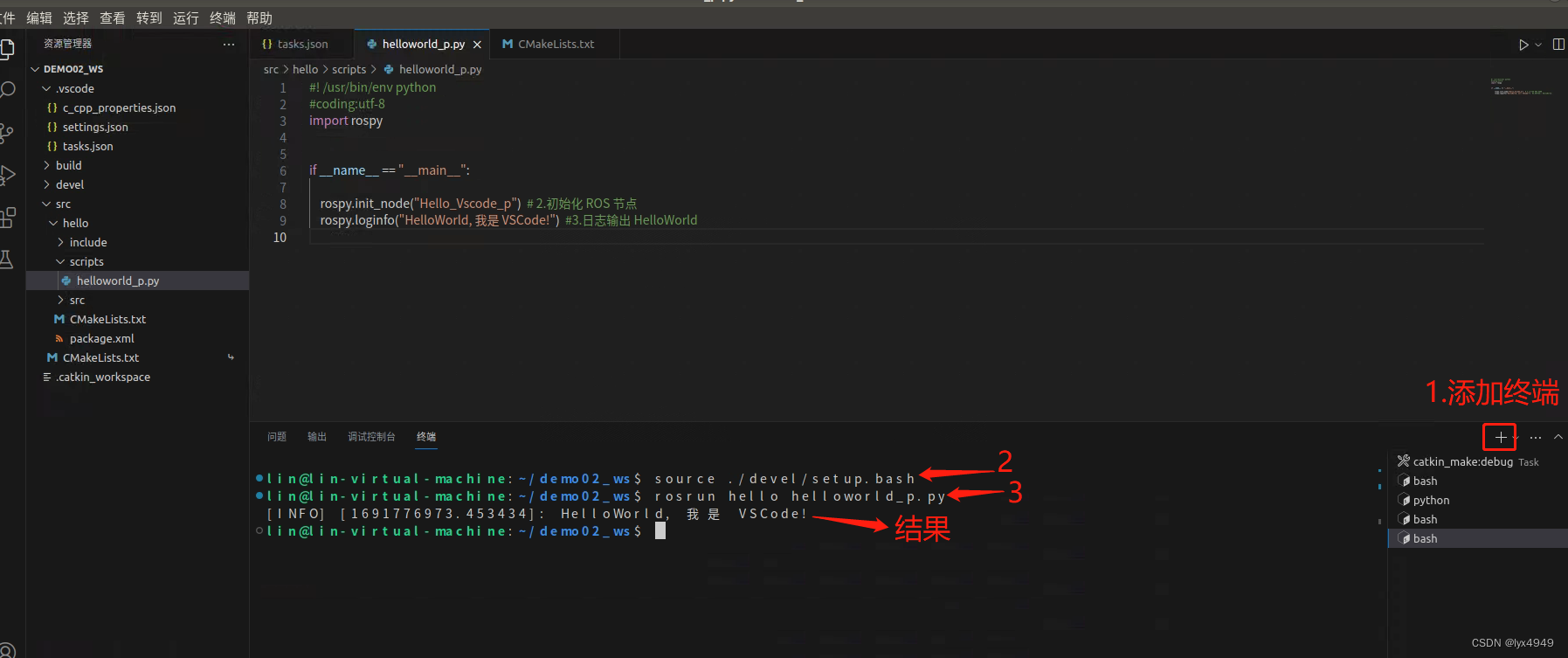
使用 VScode 开发 ROS 的Python程序(简例)
一、任务介绍
本篇作为ROS学习的第二篇,是关于如何在Ubuntu18.04中使用VSCode编写一个Python程序,输出“Hello!”的内容介绍。 首先我们来了解下ROS的文件系统,ROS文件系统级指的是在硬盘上ROS源代码的组织形式,其结构…

路径规划 | 详解维诺图Voronoi算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 维诺图规划原理2 ROS C实现(栅格图搜索)3 Python实现(路图搜索)4 Matlab实现(路图搜索) 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)&#…
ROS学习笔记(二)---使用 VScode 开发 ROS 的Python程序(简例)
一、任务介绍
本篇作为ROS学习的第二篇,是关于如何在Ubuntu18.04中使用VSCode编写一个Python程序,输出“Hello!”的内容介绍。 首先我们来了解下ROS的文件系统,ROS文件系统级指的是在硬盘上ROS源代码的组织形式,其结构…

ROS局部路径规划器插件teb_local_planner规划流程概括总结
本部分文章主要用于对ROS局部路径规划器插件teb_local_planner的规划流程进行梳理,并概括总结,本部分计划包含5~6篇文章,各文章主要内容如下: ☆第一篇:主要介绍ROS导航包Navigation中的 Movebase节点中的路径规划的相…

ROS局部路径规划器插件teb_local_planner流程梳理(下)
在我之前的文章《ROS导航包Navigation中的 Movebase节点路径规划相关流程梳理》中已经介绍过Move_base节点调用局部路径规划器插件的接口函数是computeVelocityCommands,本部分来,我们从这个函数入手梳理teb_local_planner功能包的工作流程。 ☆注&#…

【3D激光SLAM】LOAM源代码解析--scanRegistration.cpp
系列文章目录
【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp 写在前面
本系列文章将对LOAM源代码进行讲解,在讲解过程中,涉及到论文中提到的部分,会结合论文以及我自己的理解进行解读,尤其是对于其中坐标变换的部分&…
ROS中使用Navigation报错信息
在ROS中使用遇到了几个Navigation报错信息,在这里进行下记录:
[ WARN] [1688134727.429227824]: The origin for the sensor at (7.35, 13.12) is out of map bounds. So, the costmap cannot raytrace for it.
解决办法:
[ WARN] [16881…

学校ROS培训项目记录
项目内容:
在linux上安装ROS(可以使用虚拟机)编写ROS程序,实现话题的订阅和发布基于松灵小车硬件,显示雷达数据、图像数据移动松灵小车,绘制小车的运动轨迹
实现过程记录
1.ubuntu22.04上安装ros2
ubun…
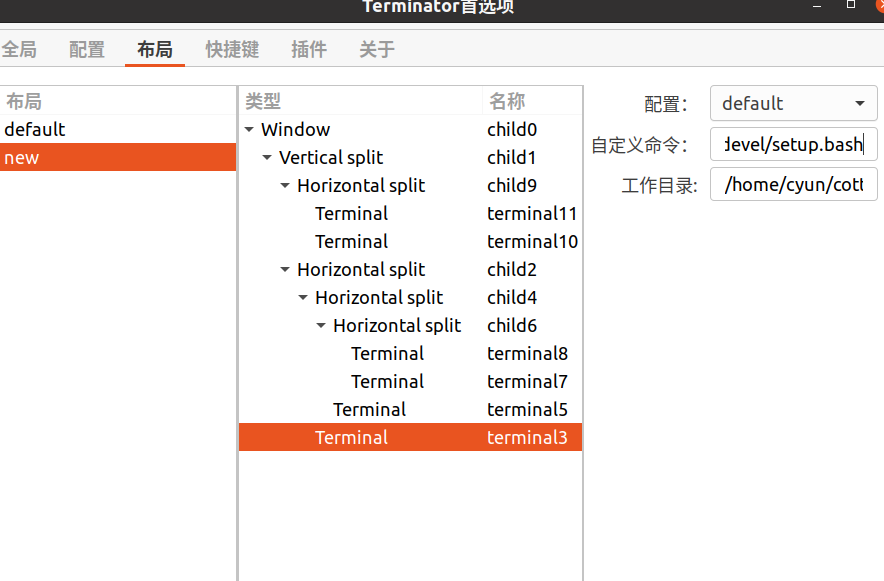
Terminator的layout设置(一个新的一键启动思路)
首先你得有terminator:
sudo apt install terminator然后就能使用了,我一般喜欢修改它原本的水平和垂直分割:用ctrlshifta和ctrlshifts 把屏幕先分成多块: 比如是这样的,接下来 右键->点击Preference 弹框中上方标…
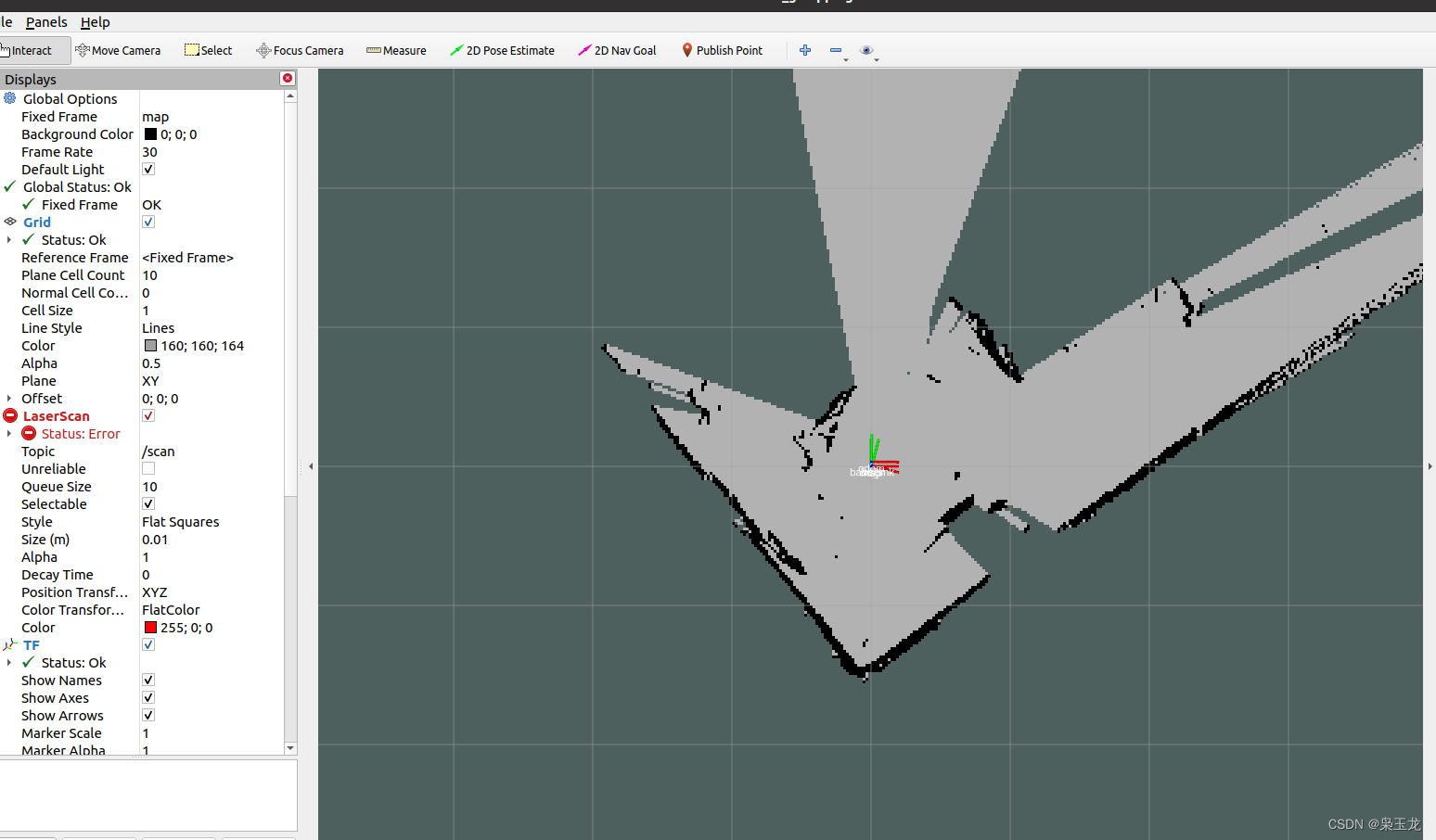
思岚雷达A2M12版本
报错:Ordered comparison between pointer and zero (‘char *’ and ‘int’) error
思岚官网下载:https://www.slamtec.com/cn/Support#rplidar-a-series 进入网页下载SDK:https://github.com/slamtec/rplidar_sdk
cd rplidar_sdk
make…
ros线程订阅API
代码功能
这段代码实现了一个ROS的临时Subscriber,主要功能是: 初始化时传入topic名称、消息类型、队列大小等参数 提供get_data()接口获取最新消息数据 调用get_data()时才会创建Subscriber,并开始接收数据 一定时间内如果没有调用,则会自动销毁Subscriber 可以重用,再次…
How to control the model in the webots usingthe ros controller ?
这里写自定义目录标题 how to use controller in Ros to control the model built in the Webots ?section 1: install ubantu 20.04 and webots 2021b ? how to use controller in Ros to control the model built in the Webots ?
section 1: install ubantu 20.04 and w…

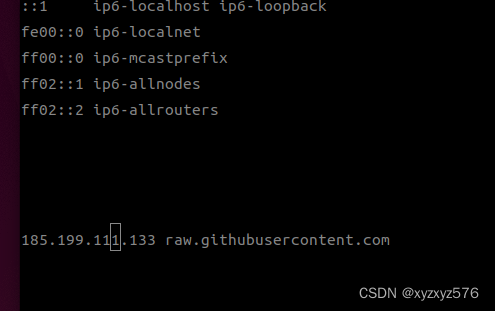
ubuntu20.04 jammy 安装ros2
ubunut22.04 jammy(5.15)
ros2版本: humble
安装参考: Ubuntu (Debian packages) — ROS 2 Documentation: Humble documentationl
按照官方给的操作指南进行操作即可,到安装软件包的时候,若只为开发࿰…
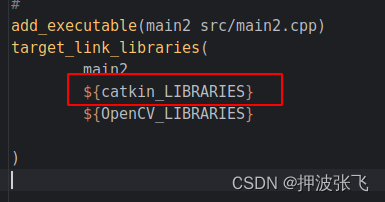
【报错】ros1中使用opencv4.8时,报错Segmentation fault
现象: ubuntu18.04下,使用ros1进行opencv4.8,操作opencv2库的时候报错了 原因: cmakelists.txt中不要加 ${catkin_LIBRARIES} 否则ros在执行时会导入默认的3.2.0版本,与4.8.0冲突。
在Docker中使用ROS的rviz时出现错误“D-Bus library appears to be incorrectly set up;“的解决方法
文章目录 报错信息解决方法参考 报错信息
process 365: D-Bus library appears to be incorrectly set up; failed to read machine uuid: UUID file /etc/machine-id should contain a hex string of length 32, not length 0, with no other text
See the manual page for d…

1.ROS操作之从空间编译到功能包编译
工作空间workspace是一个存放工程开发相关文件的文件夹 包括:src build devel install四个文件夹 要创建一个工作空间要进行以下几步:
1 创建工作空间和src文件夹:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace初始化工作空间后…
rviz配置文件是什么
在ROS中,RViz(Robot Visualization)的配置文件通常是以.rviz文件扩展名的文本文件,用于定义RViz的可视化设置和显示配置。这些配置文件允许您定义要在RViz中显示的3D可视化元素,如点云、激光扫描、机器人模型、地图、坐…
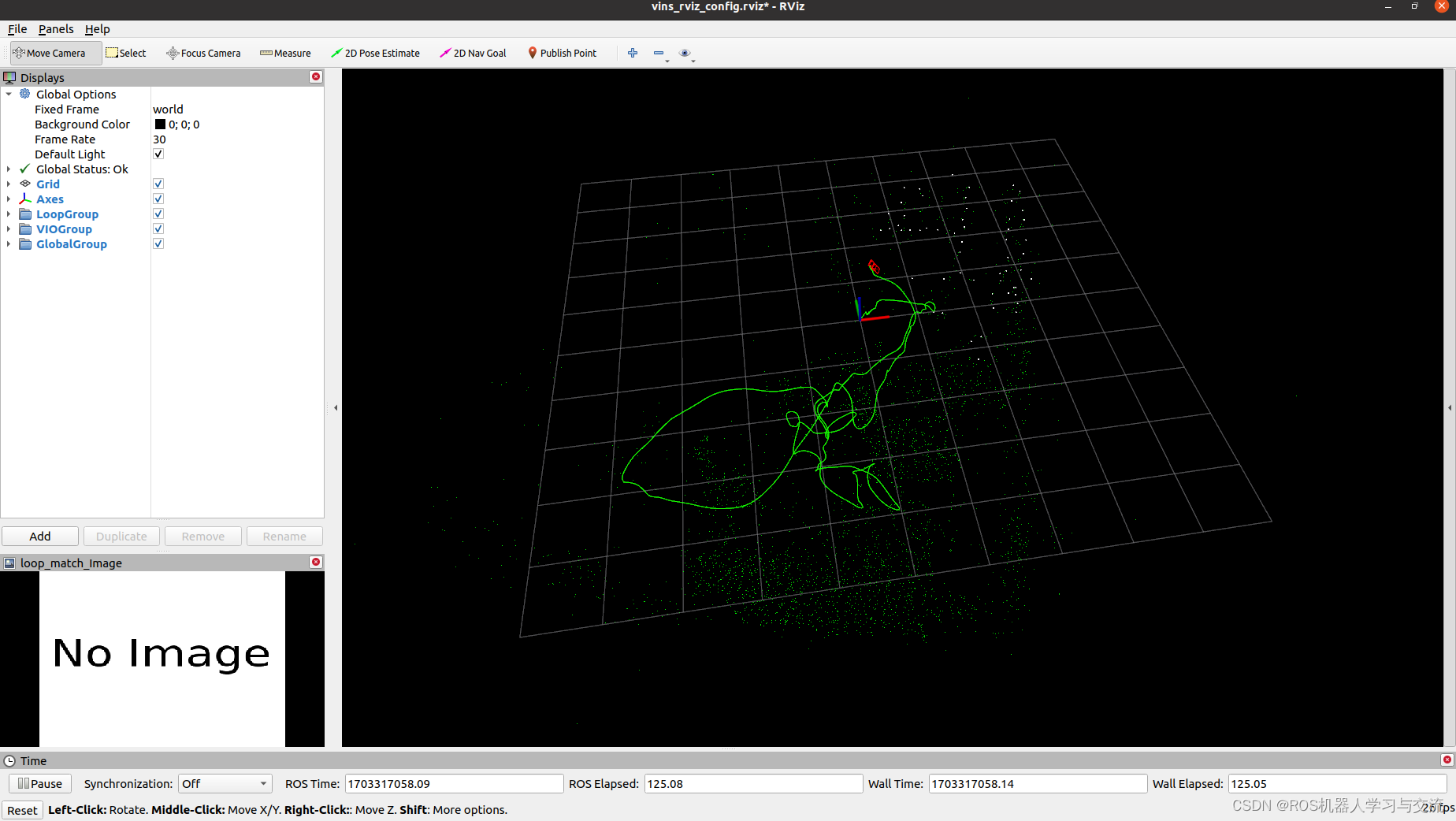
超维空间S2无人机使用说明书——21、VINS视觉定位仿真
引言:为了实现室内无人机的定位功能,S系列无人机配置了VINS-FUSION定位环境,主要包含了仿真跑数据集和实际操作部分。为了提前熟悉使用原理,可以先使用仿真环境跑数据集进行学习和理解
硬件:1080P显示器、Jetson orin…

【ROS】message_filters时间同步
😏★,:.☆( ̄▽ ̄)/$:.★ 😏 这篇文章主要介绍message_filters时间同步。 学其所用,用其所学。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下,下次更新不迷…
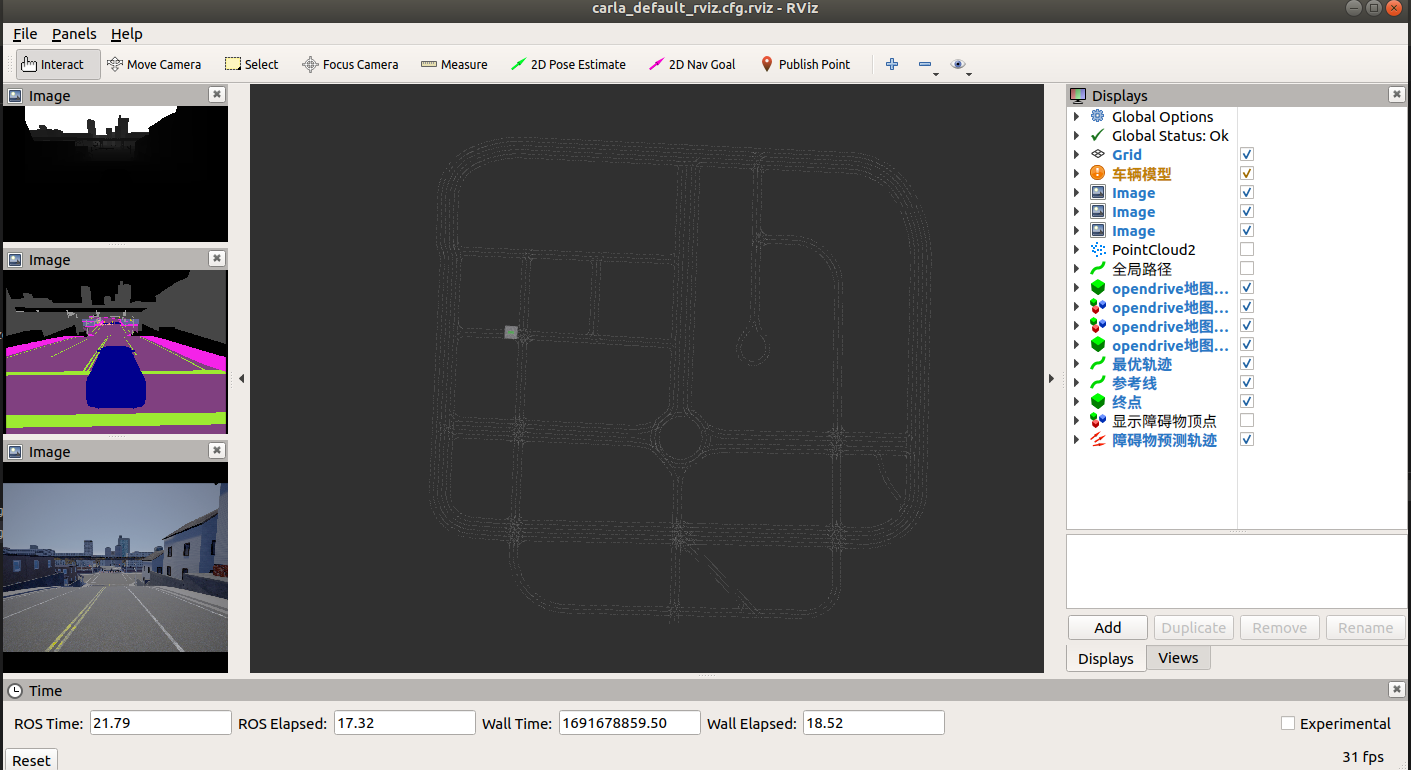
Ubuntu18.04使用carla0.9.5联合仿真搭环境报错
Ubuntu18.04使用工程与carla0.9.5联合仿真报错
1
File "/home/cg/Auto_driving/src/ros-bridge/carla_ros_bridge/src/carla_ros_bridge/client.py", line 18, in <module>from carla_ros_bridge.bridge_with_rosbag import CarlaRosBridgeWithBagFile "…
Jetson Orin NX 开发指南(9): MAVROS 的安装与配置
一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,…
ROS | launch文件详解
文章目录 概述一、原理解读1.launch文件总览2.node3.param4.arg5.rosparam6.include7.remap概述 本节详细介绍ROS中的launch文件及其内容。
一、原理解读
1.launch文件总览 launch文件基本都长这样,中间填内容。
<launch>......
</launch></
OCS2 入门教程(四)- 机器人示例
系列文章目录 前言 OCS2 包含多个机器人示例。我们在此简要讨论每个示例的主要特点。 System State Dim. Input Dim. Constrained Caching Double Integrator 2 1 No No Cartpole 4 1 Yes No Ballbot 10 3 No No Quadrotor 12 4 No No Mobile Manipul…
dji uav建图导航系列(二)导航
文章目录 1、导航节点launch文件1.1、节点参数1.2、模拟器节点1.3、无人机雷达-底盘节点1.4、地图服务器节点1.5、AMCL节点1.6、move_base节点1.7、rviz可视化节点2、导航测试2.1、导航实测2.2、动态参数配置 rqt_reconfigure1、导航节点launch文件
导航节点启动文件 uav_navi…

ROS相关技术(经验版)
重要说明:本文从网上资料整理而来,仅记录博主学习相关知识点的过程,侵删。
一、参考资料
ROS相关技术介绍,可参考之前的文章:ROS相关技术(概念版)
Autolabor主站 ROS官网 ROS ROS教程 ROS编程…
使用 rosdep 管理 ROS 2 依赖项
系列文章目录 文章目录 系列文章目录前言 清华源镜像使用一、什么是 rosdep?二、关于 package.xml 文件的一些小知识三、rosdep 是如何工作的?四、如何知道在 package.xml 中输入哪些 key ?五、如何使用 rosdep 工具?5.1 rosdep 安…
MATLAB - 使用运动学 DH 参数构建机械臂
系列文章目录 前言 一、 使用 Puma560 机械手机器人的 Denavit-Hartenberg (DH) 参数,逐步建立刚体树形机器人模型。在连接每个关节时,指定其相对 DH 参数。可视化机器人坐标系,并与最终模型进行交互。
DH 参数定义了每个刚体通过关节与其父…
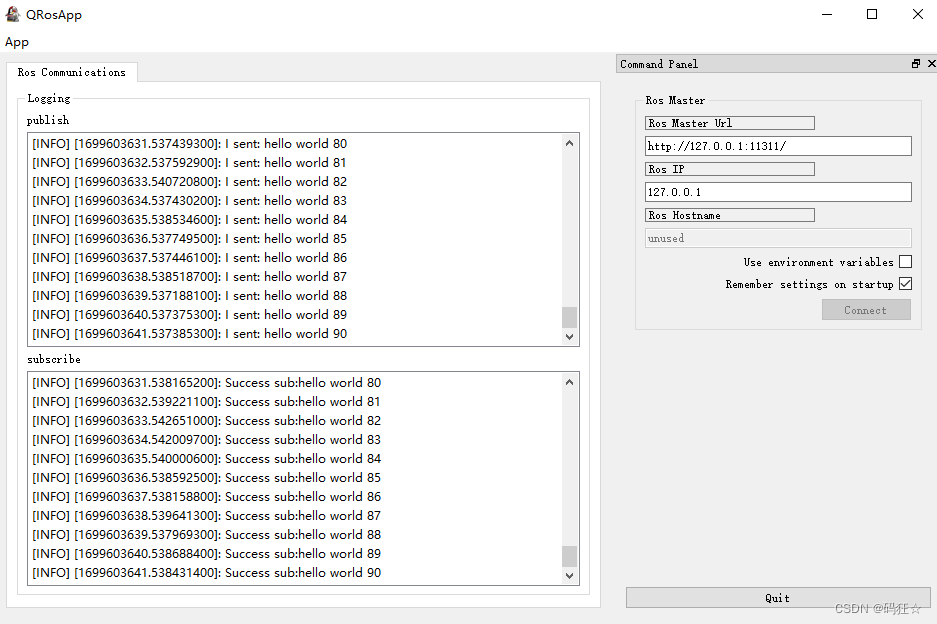
win10 下 ros + Qt 工程CMakeLists.txt
win10 下 ros Qt 工程CMakeLists.txt 系统:win10 ros: melodic Qt: 5.12.12 源码目录: D:\workspace\catkin_qt 示例代码 https://github.com/ncnynl/ros-qt.git 由于示例代码是Qt4 ,目前我是用QT5,所以CMakeLists.txt 修改如下
CMakeLists.txt
#####…
【ROS】RViz2源码下载、编译、运行
1、源码下载
1.1 源码地址
ROS1对应的RViz源码:https://github.com/ros-visualization/rviz ROS2对应的RViz2源码:https://github.com/ros2/rviz
注意:在搜索RViz2源码时,使用傻度搜索的结果是对应ROS1的RViz,使用谷歌的搜索结果是正确的,RViz和RViz2的源码链接上面已…
Gazebo 从 Ignition 迁移指南
系列文章目录 文章目录 系列文章目录前言一、概览1.1 变化1.2 Tick-tocks and Hard-tocks1.3 Tick-tocks1.3.1 Namespaces(命名空间)1.3.2 Source(源文件)1.3.3 CMake and Packaging(CMake 和打包)1.3.4 Mi…

曲线生成 | 图解三次样条曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 什么是样条?2 三次样条曲线原理2.1 曲线插值2.2 边界条件2.3 系数反解 3 算法仿真3.1 ROS C仿真3.2 Python仿真3.3 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细…

ROS Turtlebot3多机器人编队导航仿真
文章目录 前言一、Gzazebo中加载多台Turtlebot3机器人二、RVIZ中加载多个Turtlebot3机器人三.多机器人编队导航总结 前言
前面已经实现了在gazebo仿真环境中机器人一字型编队、三角形编队、N字型编队等仿真,接下来考虑多机器人编队在编队行进过程中的避障问题&…
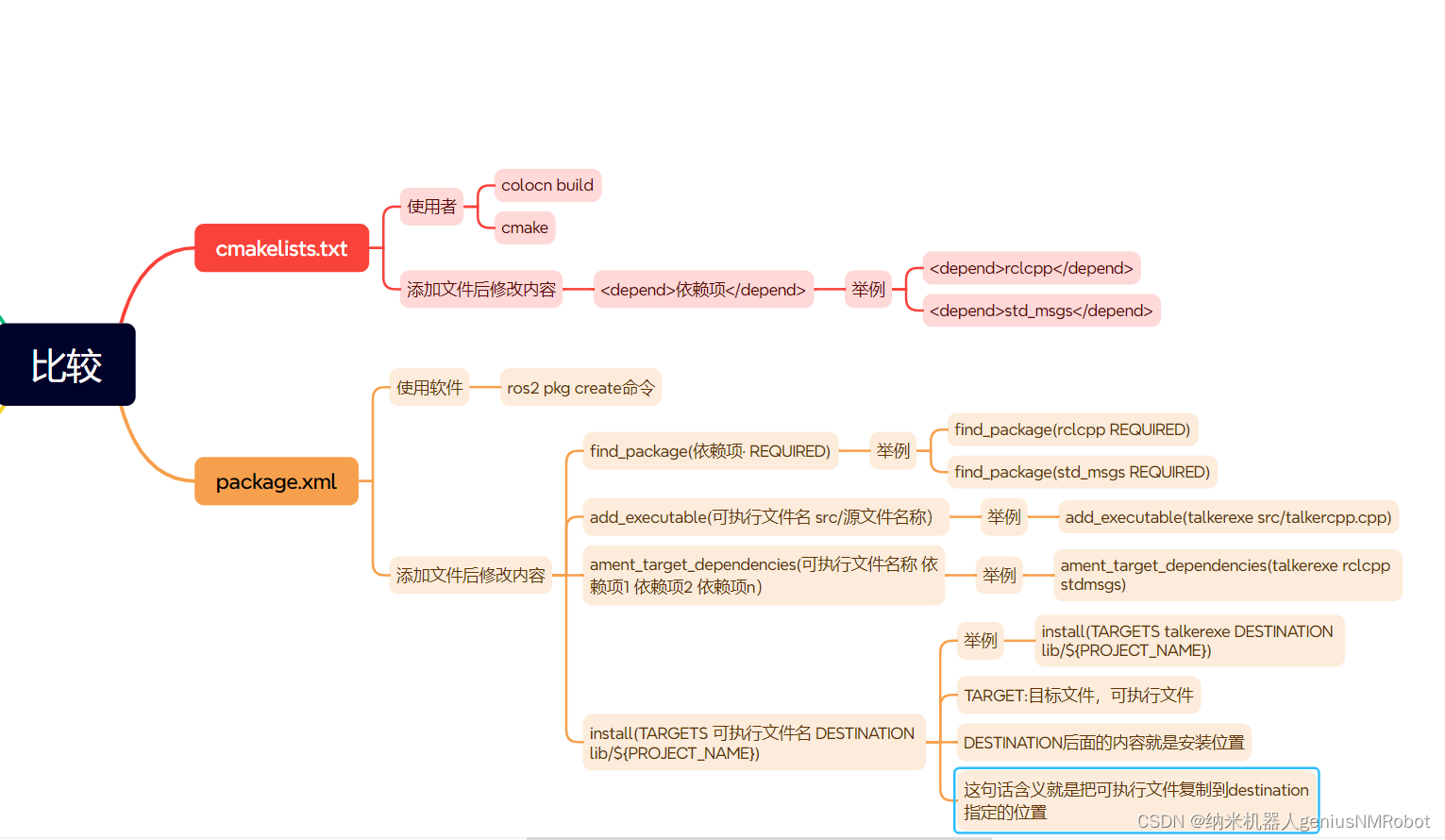
ros2文件package.xml与cmakelists.txt比较
每次在ros2里面添加文件以后,都要修改packages.xml,与cmakelists.txt文件。
vscode+ros开发环境搭建
目录
介绍
前提
vscode安装 vscode插件安装 工作空间准备 打开vscode 创建catkin包
编写cpp代码
编译
运行 启动ros服务 监听话题 启动ros测试 介绍 ros开发是机器人开发中必不可少的工作,语言选择可以是c,也可以是python。工具的话,不能像wi…

ROS第一个程序——helloworld
目录
一、工作空间的创建
1.创建工作空间并初始化
2.进入 src 创建 ros 包并添加依赖
二、C实现helloworld
C源码实现 编辑 ros 包下的 Cmakelist.txt文件
进入工作空间目录并编译
执行
三、python实现helloworld
进入 ros 包添加 scripts 目录并编辑 python 文件
…
MATLAB 系统辨识 - 在线估计 - Online Estimation
系列文章目录
MATLAB 模型参考自适应控制 - Model Reference Adaptive Control
MATLAB 自抗扰控制 - Active Disturbance Rejection Control 文章目录 系列文章目录前言一、在线参数估计二、使用步骤 前言
在线估计(Online estimation)算法是在物理系…
ROS参数服务器——参数操作(C++)
目录
一、参数服务器的新增、修改参数
1、API
2、代码
二、参数服务器获取参数
1、API
2、代码
三、参数服务器删除参数
1、API
2、代码 一、参数服务器的新增、修改参数
1、API
在 roscpp 中提供了两套 API 实现参数操作ros::NodeHandlesetParam("键",值…
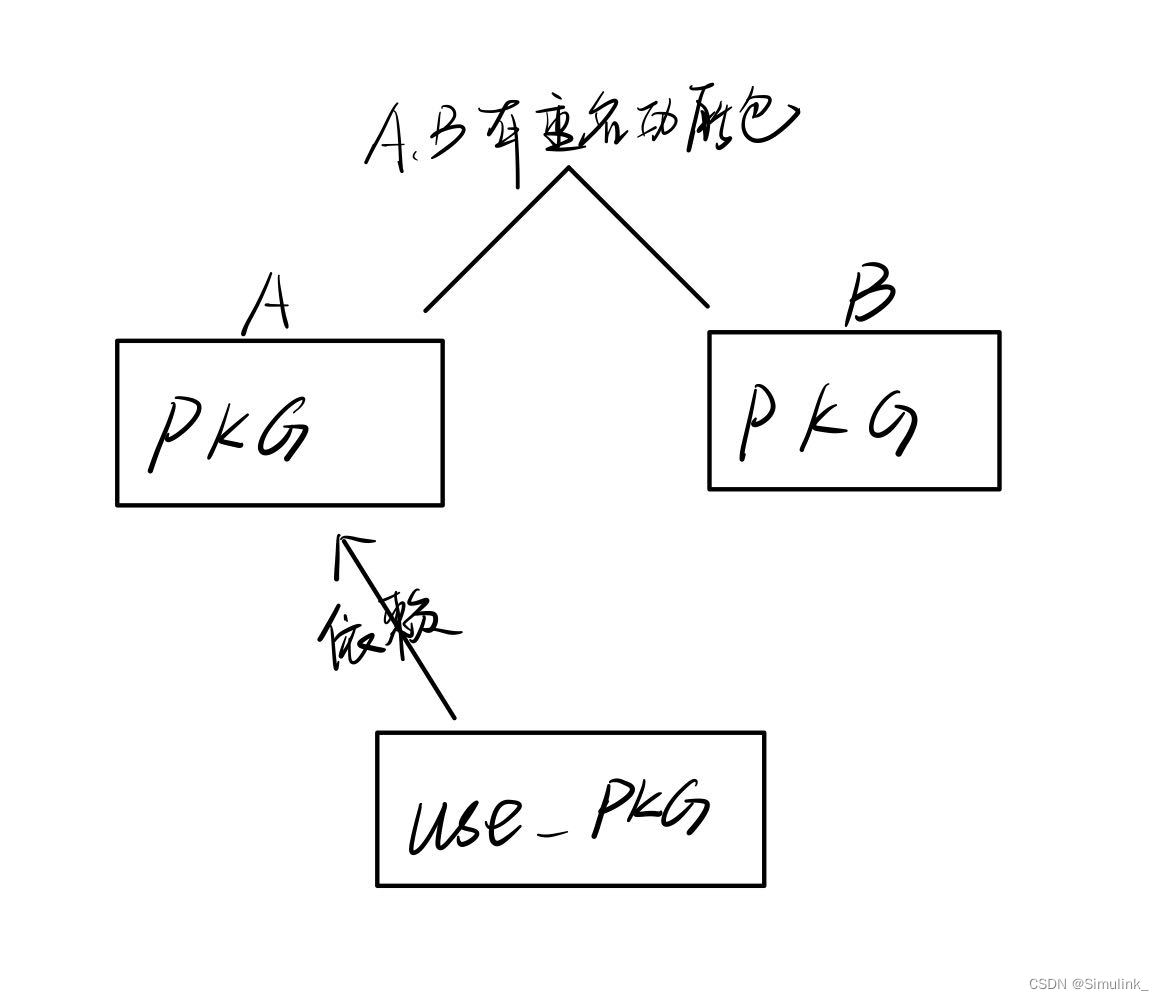
ROS学习笔记11——ROS中的重名问题
一、ros功能包重名——ros工作空间覆盖
功能包重名时,会按照 ROS_PACKAGE_PATH 查找,在前的会优先执行。ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,即调用功能包的顺序,该变量中按照 .bashrc 中配置…
ubuntu修改用户名和用户密码
1.修改passwd文件
sudo gedit /etc/passwd2.修改shadow文件
sudo gedit /etc/shadow3.修改home目录下文件夹名
mv /home/原用户名/ /home/新用户名4.修改sudo权限(修改group用户组)
sudo gedit /etc/group5.修改用户密码 sudo passwd username #修改…

移动机器人激光SLAM导航(二):运动控制与传感器篇
参考引用 机器人工匠阿杰wpr_simulation 1. 机器人运动控制
1.1 测试环境安装
wpr_simulation 安装$ mkdir -p catkin_ws/src
$ cd catkin_ws/src
$ git clone https://github.com/6-robot/wpr_simulation.git
$ cd wpr_simulation/scripts/
$ ./install_for_melodic.sh # 自…
Windows11下Docker使用记录(一)
Docker使用记录(一) 简单介绍Docker安装Docker 常用命令Docker 可视化Docker 使用GPU可视化rviz、gazebo 在进行ROS项目开发时,如果只有一台Windows电脑,我们可以考虑使用WSL或Docker来搭建ROS环境。在尝试了两种方式后࿰…
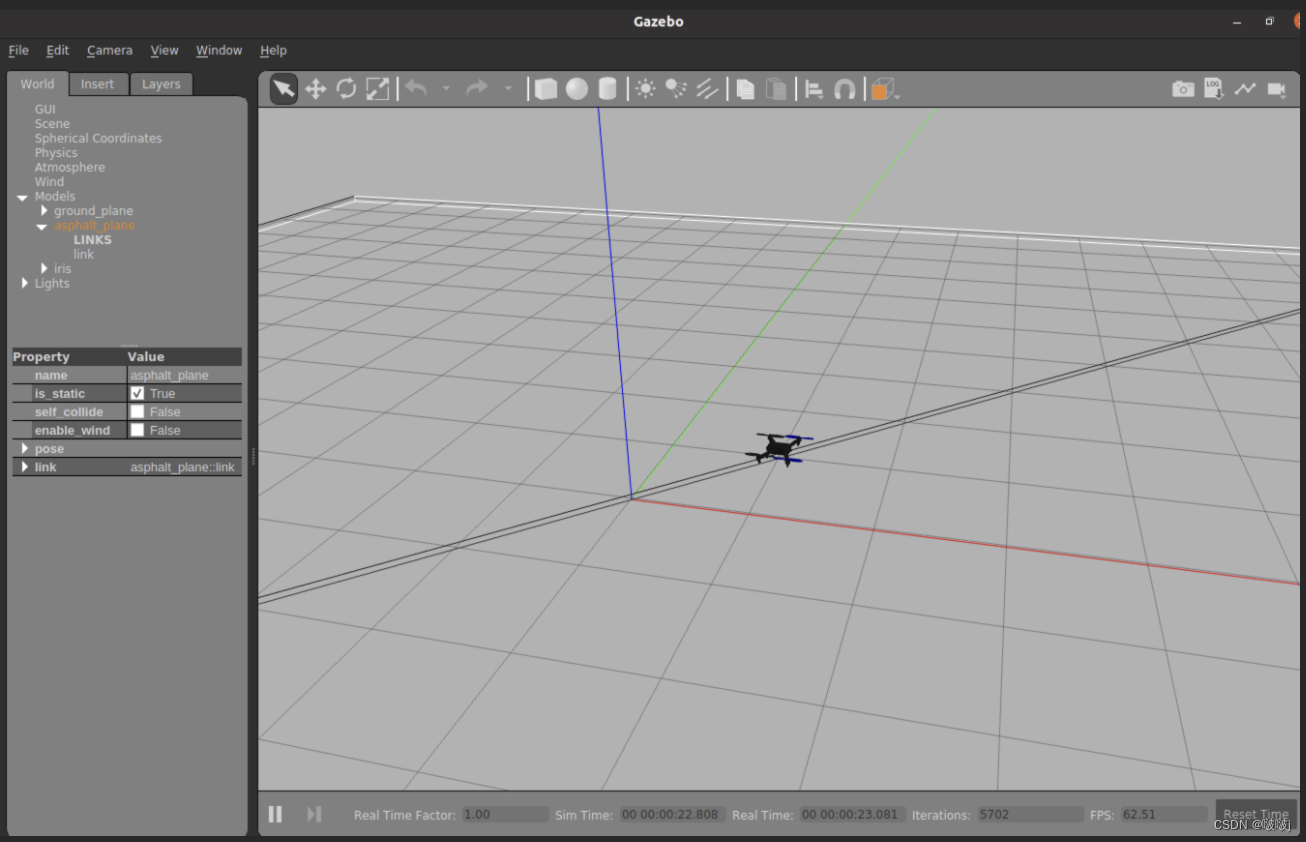
基于 parallels ubuntu 20.04 LTS (focal) 的ros+px4+gazebo 安装
系统环境:
主机环境macos 14.2.1 (23C71)、M1芯片Paralles商业版 19.1.0 (54729)ubuntuubuntu 20.04 LTS (focal)PX4v1.14.0ROS2foxy
虚拟机安装
1. 下载安装 parallels,参考评论;
2. 下载 ubuntu 镜像,使用 ubuntu 20.04 LT…
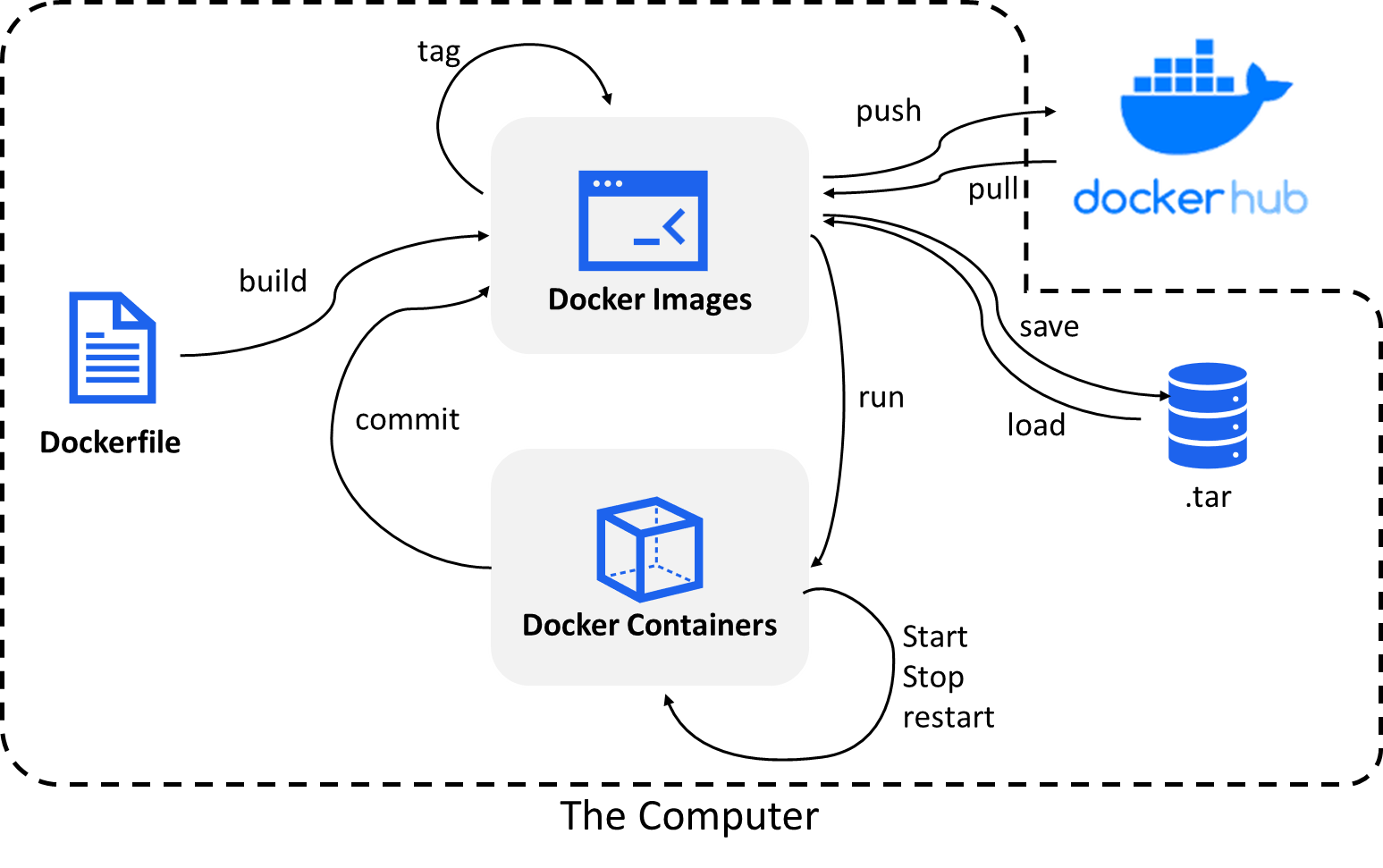
Windows11下Docker使用记录(二)
Docker使用记录(二) 1. 常用指令2. Dockerfile示例3. 构建docker image Docker中container,image,dockerfile 以及docker hub的关系如图所示,详细可见上一篇帖子。 本文主要记录Dockerfile相关。 1. 常用指令
常用指令…

ROS机器人未知环境自主探索功能包explore_lite最全源码详细解析(一)
本系列文章主要针对ROS机器人常使用的未知环境自主探索功能包explore_lite展开全源码的详细解析,并进行概括总结。 本系列文章共包含六篇文章,前五篇文章主要介绍explore_lite功能包中 explore.cpp、costmap_tools.h、frontier_search.cpp、costmap_clie…
ROS常见问题 | 虚拟机打开RVIZ闪退出错
文章目录 环境复现BUG原因解决环境
WIN10虚拟机 VMware Workstation16 Pro Ubuntu18.04
复现
使用rviz命令打开rviz
rviz -d xxx.rvizBUG
[ INFO] [1694154353.619329866]: rviz version 1.13.30
[ INFO] [1694154353.619364
【ROS机器人系统】实验1 熟悉ROS操作系统、熟悉ROS通信架构
文章目录 实验1 熟悉ROS操作系统、熟悉ROS通信架构1、实验目的2、实验设备3、实验内容3.1 安装ROS3.2 ROS常用指令以及小海龟示例roscore命令rosrun命令rosnode 命令roscd 命令rostopic 命令动手实现1:rosservice 命令roslaunch 命令动手实现2:
ROS目标跟随(路径规划、slam、定位、雷达)——接上文,改善跟随的位置
确保进行跟随的小车始终在身后 最终效果代码改进 最终效果 ROS目标跟随改进版 代码改进
这里给出上一篇博客的链接:https://blog.csdn.net/m0_71523511/article/details/135610191
使用上一篇的launch文件创建机器人时,ros会自动创建一个坐标系相对关系…

ROS相机内参标定详细步骤指南
作者: Herman Ye Galbot Auromix 版本: V1.0 测试环境: Ubuntu20.04 、ROS1 Noetic 更新日期: 2023/09/14 注1: 本文内容中的硬件由 Galbot 提供支持。 注2: Auromix 是一个机器人爱好者开源组织。 注3&…
【ROS】RViz、Gazebo和Navigation的关系
1、RViz
RViz(Robot Visualization,机器人可视化)是一个用于可视化机器人系统的开源工具,用于显示和调试机器人的传感器数据、状态信息和运动规划等。它是ROS(Robot Operating System)的一部分,是ROS中最常用的可视化工具之一。
RViz:“我们不生产数据只做数据的搬运…

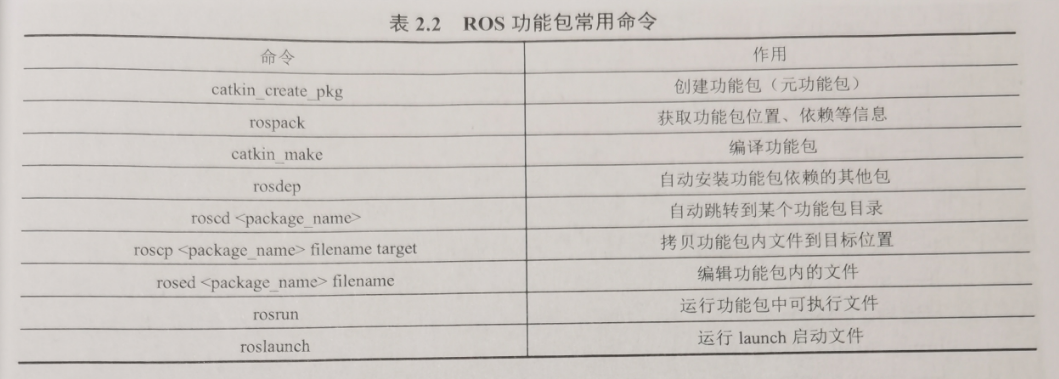
ROS机械臂开发-开发环境搭建【一】
目录 前言环境配置docker搭建Ubuntu环境安装ROS 基础ROS文件系统 bugs 前言
想系统学习ROS,做一些机器人开发。因为有些基础了,这里随便写写记录一下。
环境配置
docker搭建Ubuntu环境
Dockerfile
# 基础镜像
FROM ubuntu:18.04
# 设置变量
ENV ETC…
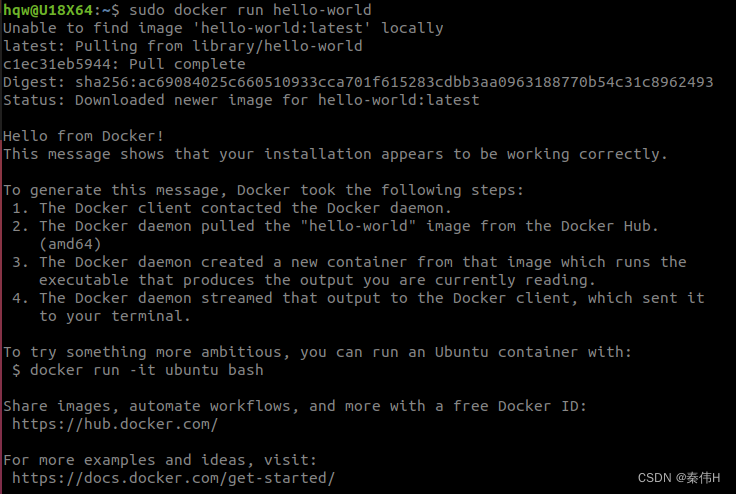
ubuntu多用户环境dockerbug,卸载重装docker流程
之前不小心误操作删除重装docker,结果删除没成功,更没法重装,每次apt install都会报一个docker错误,虽然不影响软件的常规安装~但是现在还是需要装一个完整docker,还是选择删除一下,重点是关闭服…
【ROS】获得gazebo仿真环境下的真实数据
rossrv info gazebo_msg/GetModelState rostopic echo /gazebo/model_states

open_vins 安装(ubuntu18.04 opencv3.2.0)
openvins官网
Getting Started Installation Guide (ROS1 and ROS2) | OpenVINS
Ubuntu 18.04 ROS 1 Melodic (uses OpenCV 3.2)
这里他指的是ros1 melodic,他们用的opencv3.2测试过。 open_vins 官方给的组合Ubuntu 18.04 ROS 1 Melodic (uses OpenCV 3.2)
Ub…
超详细!ROS 包开发工作全流程及所有命令归纳!
ROS 包开发工作流程
设置工作区: 创建一个新工作区(如果尚不存在): 嘘复制代码
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make获取 ROS 环境(选择正确的 ROS 版本): 嘘复制代码
sourc…
![[ROS 系列学习教程] rosbag C++ API](https://img-blog.csdnimg.cn/direct/5f927cceba4d474da5b8887bc77d34e4.png#pic_center)
[ROS 系列学习教程] rosbag C++ API
ROS 系列学习教程(总目录) 本文目录 一、rosbag::Bag1.1 常用接口1.2 其他接口 二、rosbag::View2.1 常用接口2.1.1 代码示例 rosbag 的 C API 主要有两个类,用于写bag文件的Bag类,和用于读bag文件的View类。
一、rosbag::Bag
用于写bag文件。
头文件…
OCS2 入门教程(五)- 从 URDF 到 OCP、配置求解器、MPC - Net
系列文章目录 前言
阻碍 MPC 在机器人任务中广泛应用的主要挑战之一是设置最优控制问题的负担。OCS2 提供了多个辅助类,用于定义一些常用模型、成本和约束条件,以减轻这一问题。为此,OCS2 提供了多个第三方软件包接口,如 RobCoGe…
ROS | ros::NodeHandle
文章目录 概述一、定义介绍二、代码解读1.创建节点句柄2.发布和订阅话题3.调用和提供服务4.获取和设置参数5.控制循环频率和执行回调函数概述 本节详细介绍ros::NodeHandle的原理和使用。
一、定义介绍 ros::NodeHandle是ROS C++ API中的一个类,用于创建和操作ROS节点(句柄)…
下载树莓派对应的64位Ubuntu系统步骤
说点废话:因为ros2需要安装在64位Ubuntu上面,所以安装64位最合适;
第一步打开https://cn.ubuntu.com/
网站;选择下载--->iot----> 选择这个镜像文件下载。我觉得镜像文件是img格式的,跟iso文件区别是ÿ…
ROS——集成开发环境搭建
1.4 ROS集成开发环境搭建
和大多数开发环境一样,理论上,在 ROS 中,只需要记事本就可以编写基本的 ROS 程序,但是工欲善其事必先利其器,为了提高开发效率,可以先安装集成开发工具和使用方便的工具:终端、ID…
Windows11 - Ubuntu 双系统及 ROS、ROS2 安装
系列文章目录 前言 一、Windows11 - Ubuntu 双系统安装
硬件信息:
设备名称 DESKTOP-B62D6KE
处理器 13th Gen Intel(R) Core(TM) i5-13500H 2.60 GHz
机带 RAM 40.0 GB (39.8 GB 可用)
设备 ID 7673EF86-8370-41D0-8831-84926668C05A
产品 ID 00331-10000-0000…

第 4 课 创建工作空间与功能包
文章目录 第 4 课 创建工作空间与功能包1.工作环境的创建2.ROS功能包的创建 第 4 课 创建工作空间与功能包 消息和服务的创建、发布器和订阅器的编写、服务端和客户端的编写都是基于Ros功能包进行操作的,因此在进行上述操作前,需要先创建工作空间及功能包…
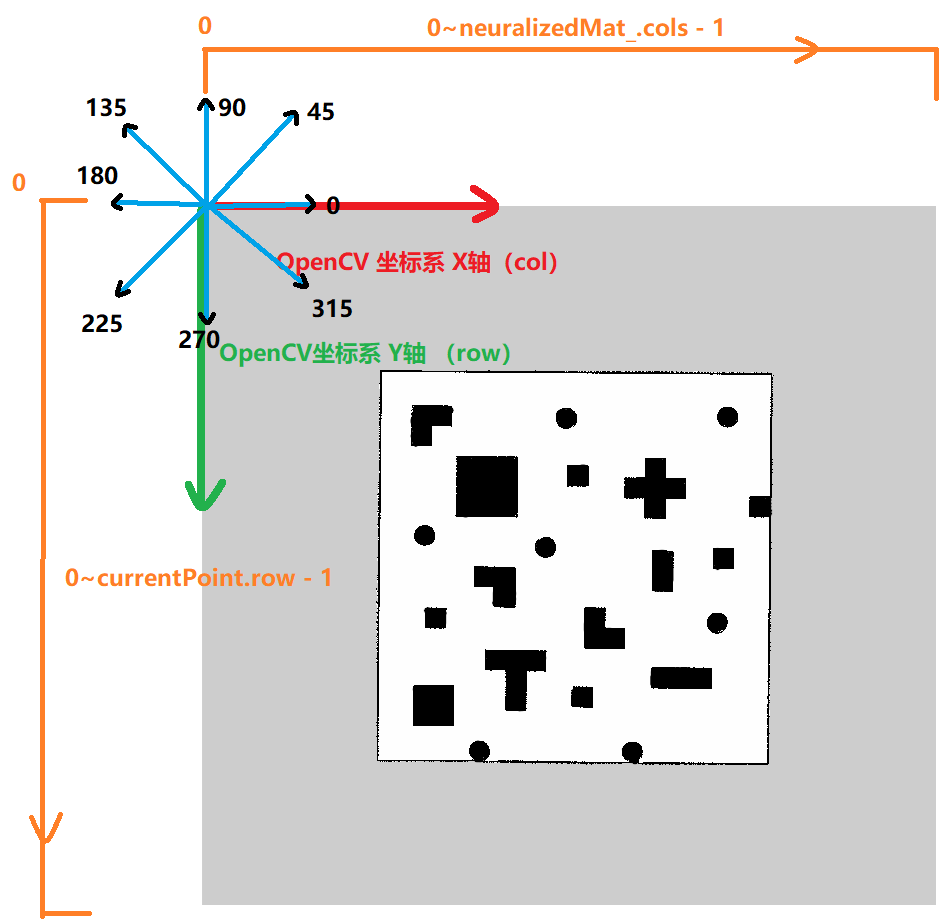
全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(下)
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。 1、全覆盖路径规划开…

ROS2从入门到精通0-3:VSCode 搭建 ROS2 工程环境
目录 0 专栏介绍1 Ubuntu下安装VSCode1.1 基本安装1.2 将VSCode添加到侧边栏 2 VSCode集成相关插件3 VSCode运行ROS2环境步骤3.1 安装编译依赖项3.2 创建工作空间和源码空间3.3 启动VSCode与配置 4 测试工程环境4.1 C版本4.2 Python版本 0 专栏介绍
本专栏旨在通过对ROS2的系统…
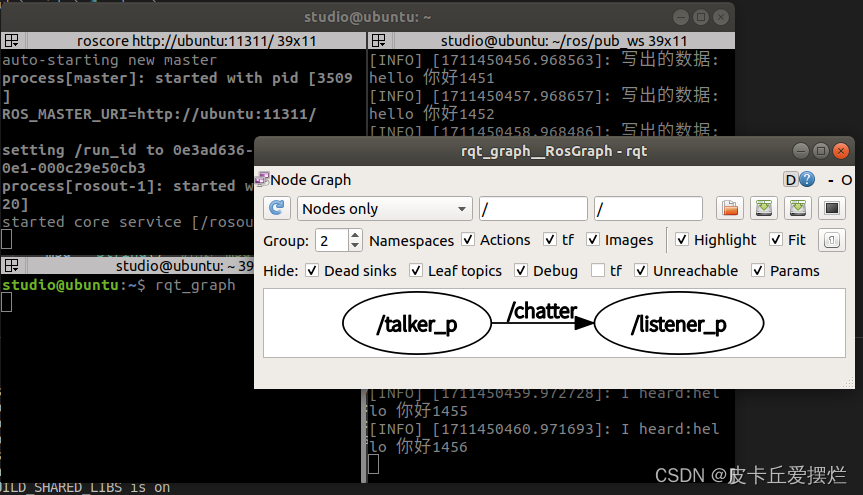
ROS机器人入门第四课:话题通信
文章目录 ROS机器人入门第四课:话题通信一、话题通信概述(一)概念(二)作用 二、话题通信基本操作需求:分析:流程:(一)发布方解释一些关键的ROS函数和概念: (二࿰…
ROS melodic android_apps移植
目录
环境
遇到问题
问题一 Waiting for maps ...
问题二 Attempting to connect to mongodb localhost:27017
问题三 Insert map failed
问题四 保存同名地图错误 mongo 环境
Ubuntu 18.04 ROS melodic
Windows 10 Android Studio 2020.3.1 Patch 3
遇到问题
问…
Example: use raspberry pi 4 control multiple motors(tb660)
abstract
This is a project for controlling multiple motors by using joystick, the buttons’ information can be obtained from topic “/joystick”. We got the sensor’s signals from arduino, and sent the command from topic “joystick”.
raspberry pi code(p…

一起来从Solidworks中导出URDF模型
这个博客是用来记录关于【从Solidworks中导出URDF模型】的学习历程:
相关课程链接见:如何从Solidworks导出URDF模型 • 古月 (guyuehome.com) 下面让我们一起开始吧!!! 1. sw_urdf_exporter插件介绍 插件下载链接&…

双机 Cartogtapher 建图文件配置
双机cartogtapher建图
最近在做硕士毕设的最后一个实验,其中涉及到多机建图,经过调研最终采用cartographer建图算法,其中配置多机建图的文件有些麻烦,特此博客以记录
非常感谢我的同门 ”叶少“ 山上的稻草人-CSDN博客的帮助&am…
【ROS机器人系统】实验 2 熟悉和使用 URDF 创建机器人模型
文章目录 实验 2 熟悉和使用 URDF 创建机器人模型1、实验目的2、实验设备3、实验内容3.1 创建 URDF 机器人模型:(1)URDF 介绍(2)准备建立机器人模型创建文件夹以及功能文件编写相关机器人模型信息运行演示完善机器人再次运行查看动手实现1∶利用实验所学知识,为机器人添加…

ros自定义action记录
文章目录 自定义action1. 定义action文件2. 修改 package.xml3. 修改 CMakeLists.txt4. 运行 catkin build4. simple_action_server.py5. simple_action_client.py 测试 自定义action
ros 版本:kinetic 自定义test包的文件结构如下
|-- test
| |-- CMakeLists.t…
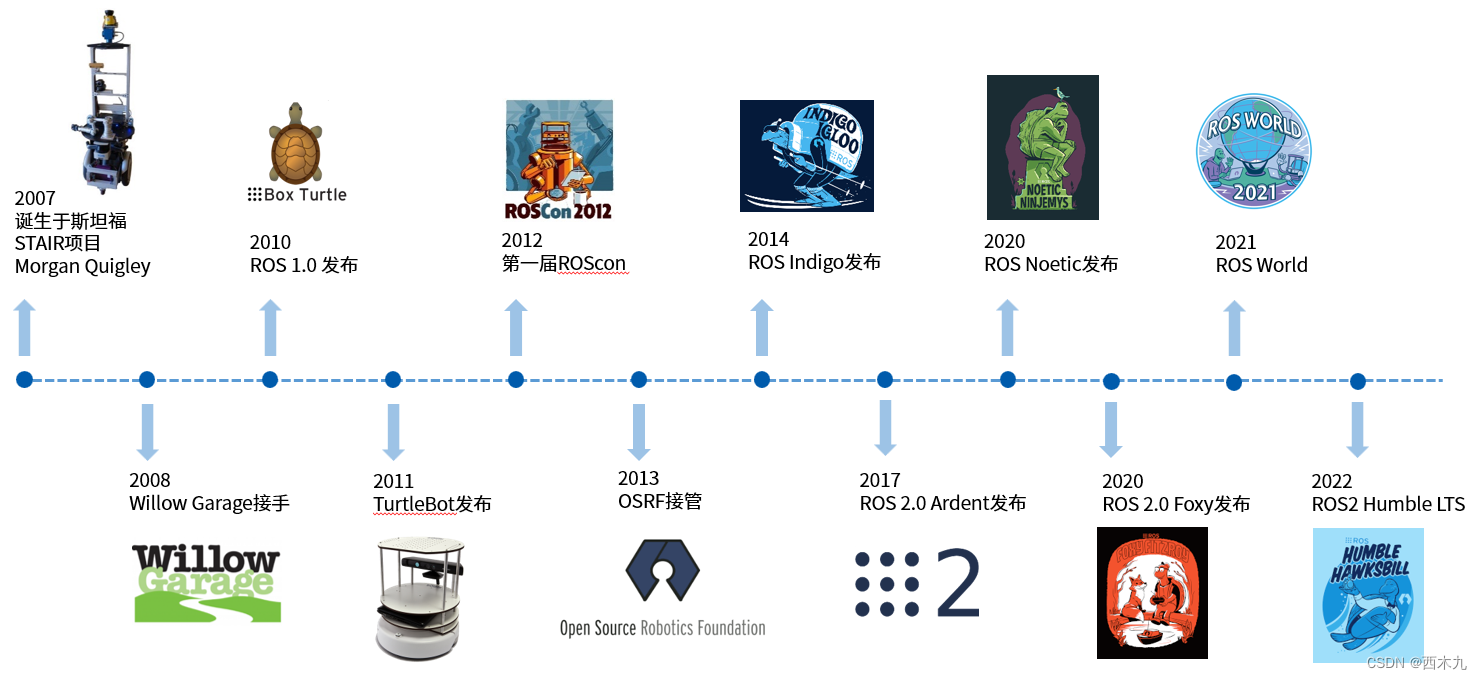
ROS-Ubuntu 版本相关
ROS-Ubuntu 版本相关:安装指引 年代ROS1版本Ubuntu 版本2014Indigo14.042016Kinetic16.042018Melodic18.042020Noetic20.04 & 22.04
ROS2兼顾了工业使用上的问题。
年代ROS2版本Ubuntu 版本2022Humble20.04 & 22.042023Iron16.04
相关参考: […
深入理解ROS中的回调函数与spin()方法
随着机器人技术的飞速发展,Robot Operating System(ROS)已经成为一个广泛应用于机器人领域的强大框架。在ROS中,回调函数(Callback)和spin()方法是至关重要的概念,它们为实现异步通信、事件处理…
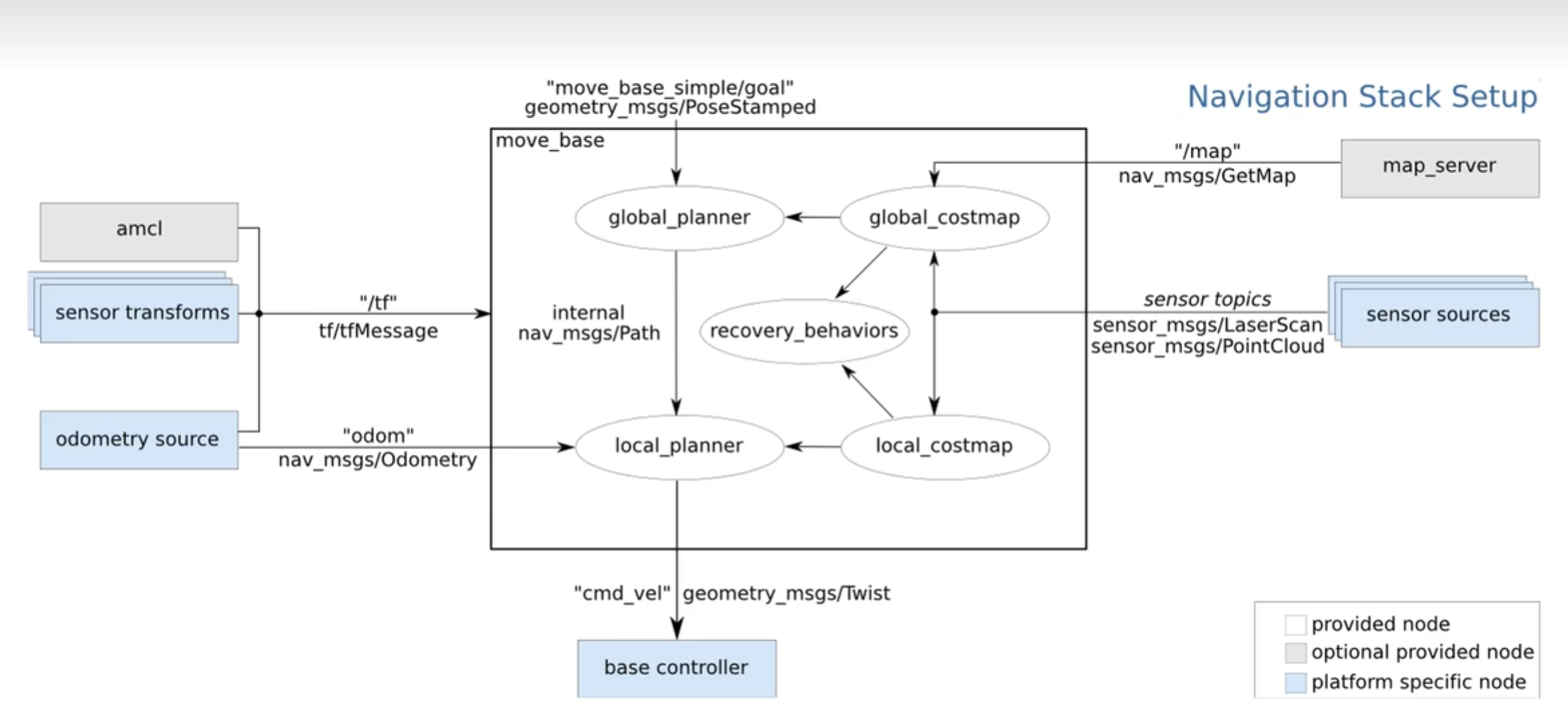
使用开源ros包实现导航功能(一)
本次程序升级过程为python转到c环境,实现真正的可编译式编程。 由于我自己记性不是很好,所以需要每天把这种最基础的事情反复过一遍,同时,由于没有老师专门督导你的训练,所以建立了博客机制,从现在开始&…
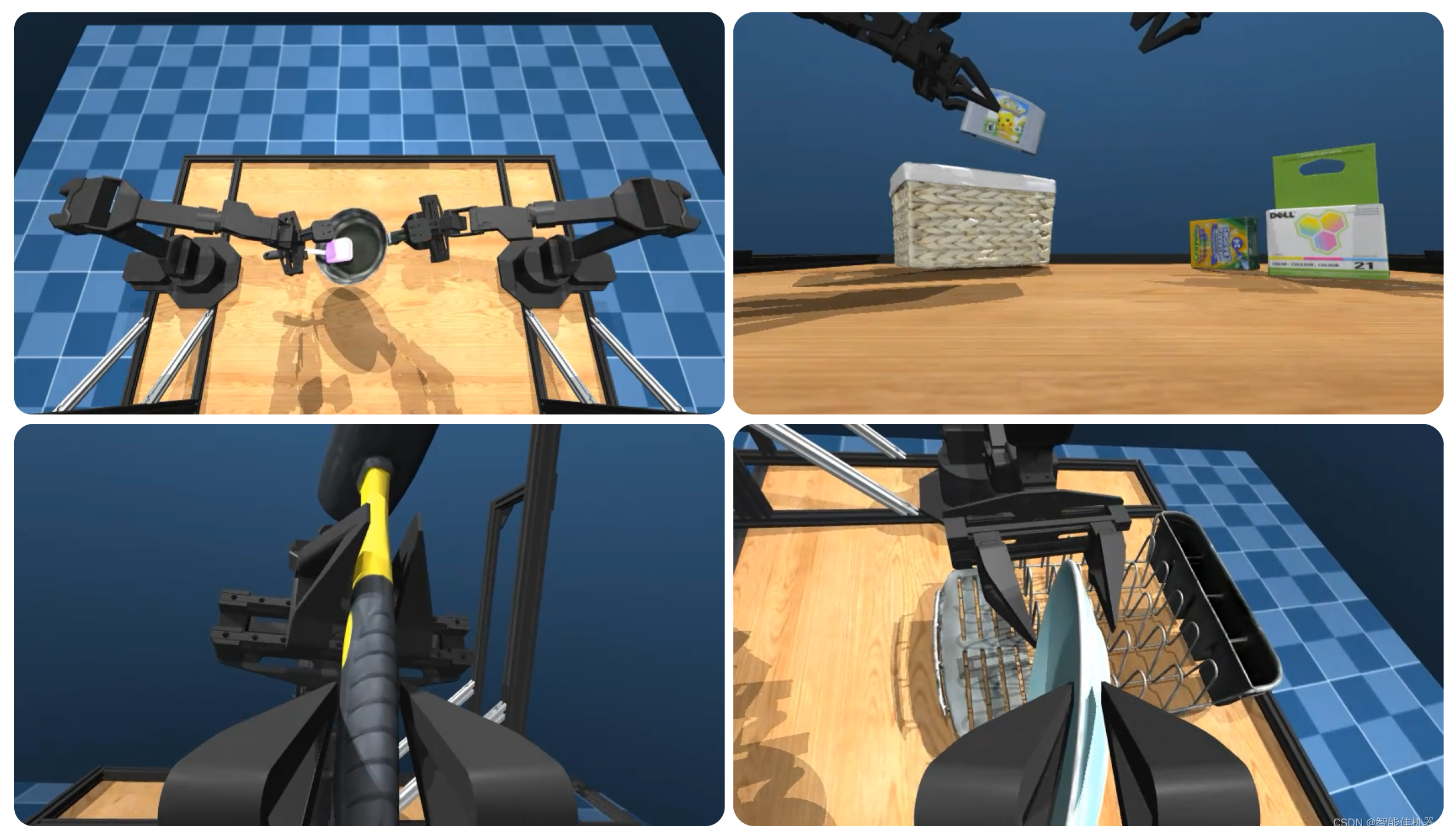
国内也可以直接采购谷歌与斯坦福联合开发的ALOHA 2双臂协作开源平台了
2024年 1 月,谷歌 DeepMind 联合斯坦福推出了 ALOHA 的增强版本 —ALOHA 2。与一代相比,ALOHA 2 具有更强的抓持性能、更符合人体工程学设计和更强的稳健性,并且在国内就可以直接采购,整套成本还不到 20 万元人民币。 可订购的套装…
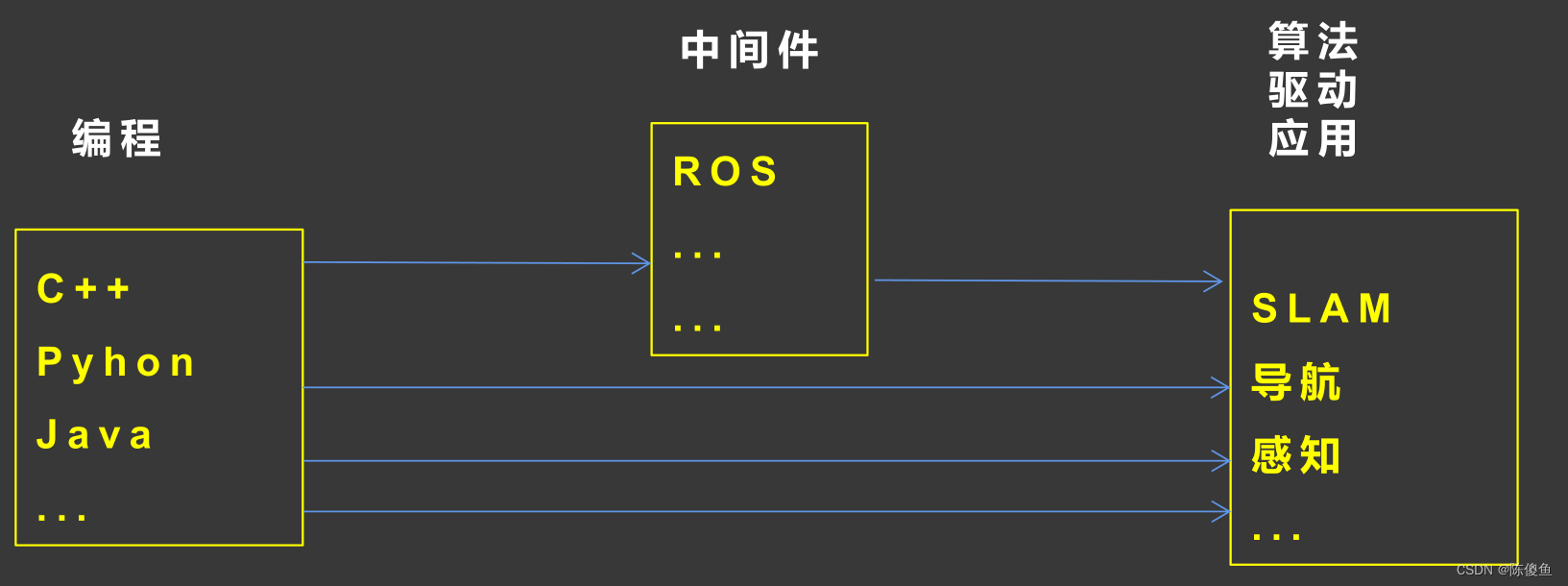
ROS读书记录1:机器人SLAM导航核心技术与实战1
机器人SLAM导航核心技术与实战1 第一章第2章 ROS简介 视频参考:
《机器人SLAM导航核心技术与实战》书籍配套教学视频 第一章 第2章 ROS简介
ROS:机器人开发平台 ①ROS是一个分布式通信框架(最核心的本质 ②ROS是一个开发工具的集台 ③ROS是一系列开源软件包
计算…
Ubuntu 20.04 ROS1 与 ROS2 通讯
激光雷达和3d视觉传感器驱动很多都是基于ros1开发的,由于自己项目在ros2环境开发,需要获取从驱动出来的点云数据流,所以尝试订阅ros1出来的点云topic话题,固需要ros1与ros2之间建立通讯连接。
项目环境: Legion-Y7000…

ROS从入门到精通4-2:Docker安装ROS、可视化仿真与终端复用
目录 0 专栏介绍1 Docker安装ROS2 Docker可视化仿真2.1 显示配置2.2 启动容器 3 终端复用工具3.1 session操作3.2 window操作3.3 pane操作3.4 其他操作 0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS…
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6 文章目录 前言一、创建controller相关二、逻辑分析RRBotModularJoint类解析ros2_control.xacro解析三、测试运行测试forward_position_controller总结前言
本篇文章在上篇文章的基础上主要讲解双轴机器人驱…
raspberry4B安装realsenseD435驱动及ROS2调用
raspberry4B安装realsenseD435驱动 文章目录 前言一、编译安装流程总结 前言
最近有一个需求是开发raspberry在树莓派上实现realsense D435相机驱动的开发,没有现成的驱动需要手动编译,并且网上查到的大多是树莓派安装Ubuntu 22.04或20.04等系统&#x…
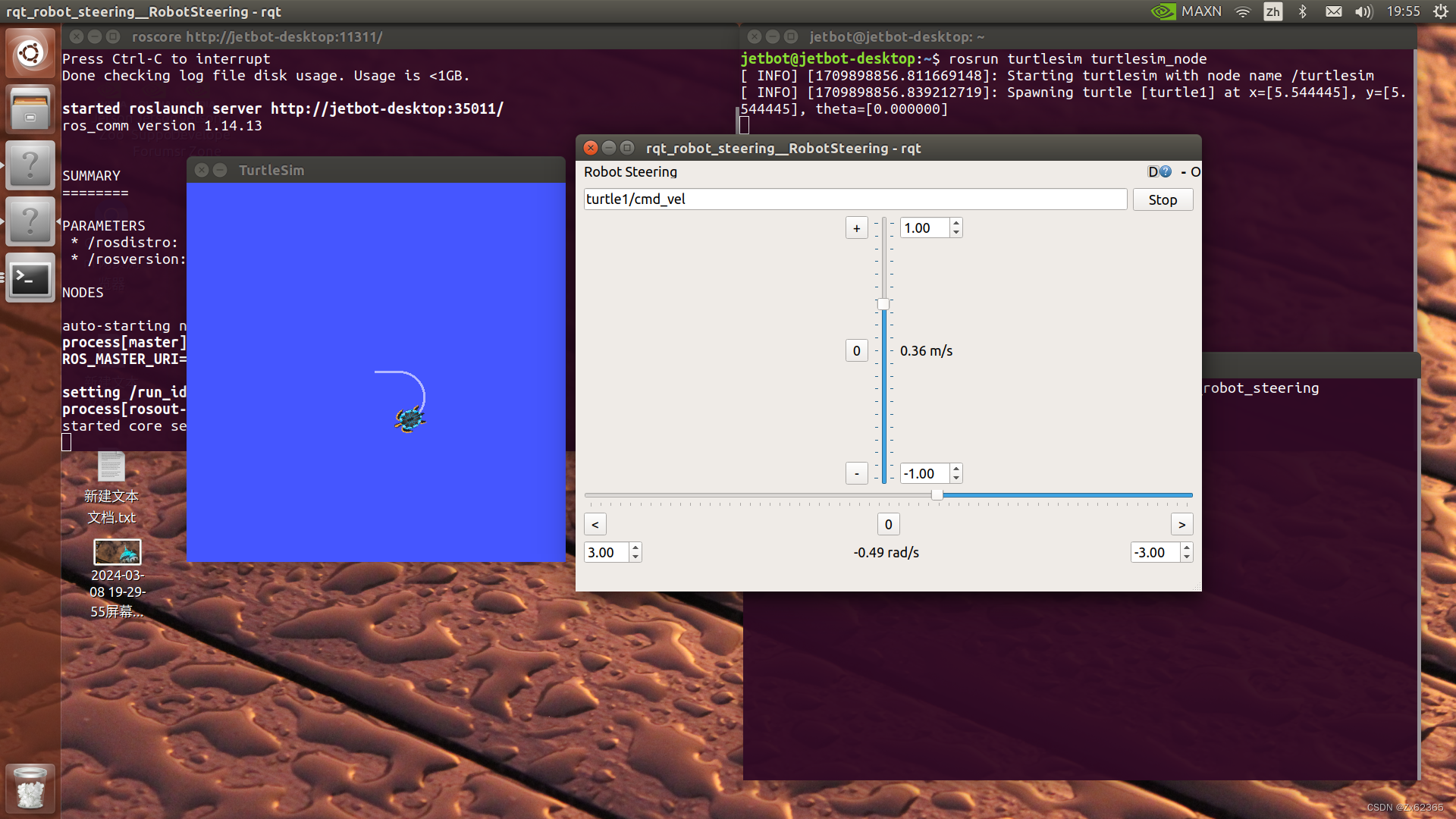
下载一些ROS的包的方式
ROS Index 我们可以去ROS Index网站下载一些我们需要的包。打开浏览器在网址框输入index.ros.org。或者点击此处链接ROS Index 在这个网站中我们可以浏览并找到我们需要的包,也可以下载它的源代码或者仅安装到我们的系统中来使用。(安装过程在终端中进行…
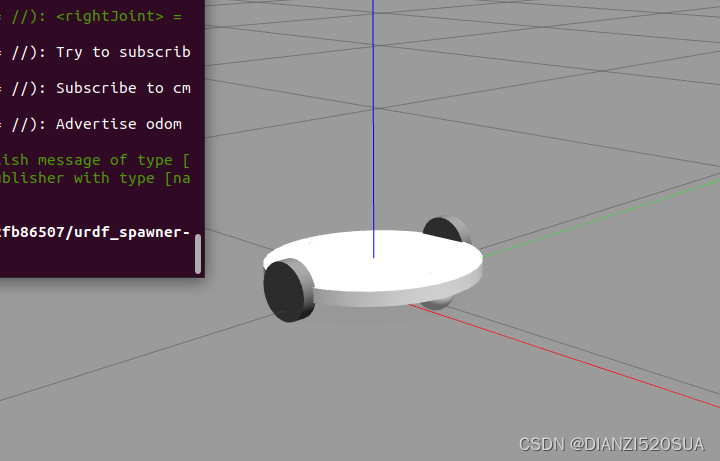
ros小问题之差速轮式机器人轮子不显示(rviz gazebo)
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图, 后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子&…
![[ROS 系列学习教程] rosbag Python API](https://img-blog.csdnimg.cn/direct/d90a65e3a44a446d9da741646a4070c4.png#pic_center)
[ROS 系列学习教程] rosbag Python API
ROS 系列学习教程(总目录) 本文目录 1. 构造函数与关闭文件2. 属性值3. 写bag文件内容4. 读bag文件内容5. 将bag文件缓存写入磁盘6. 重建 bag 文件索引7. 获取bag文件的压缩信息8. 获取bag文件的消息数量9. 获取bag文件记录的起止时间10. 获取话题信息与消息类型 rosbag 的 Pyt…
tf2::Transform 是 ROS tf2 库中用于表示二维或三维空间中的坐标变换的类
文章目录 tf2::Transform 是 ROS tf2 库中用于表示二维或三维空间中的坐标变换的类。下面是关于 tf2::Transform 的一些常见用法: 创建一个变换对象: tf2::Transform transform;设置平移和旋转: // 设置平移
tf2::Vector3 translation(x, y, …
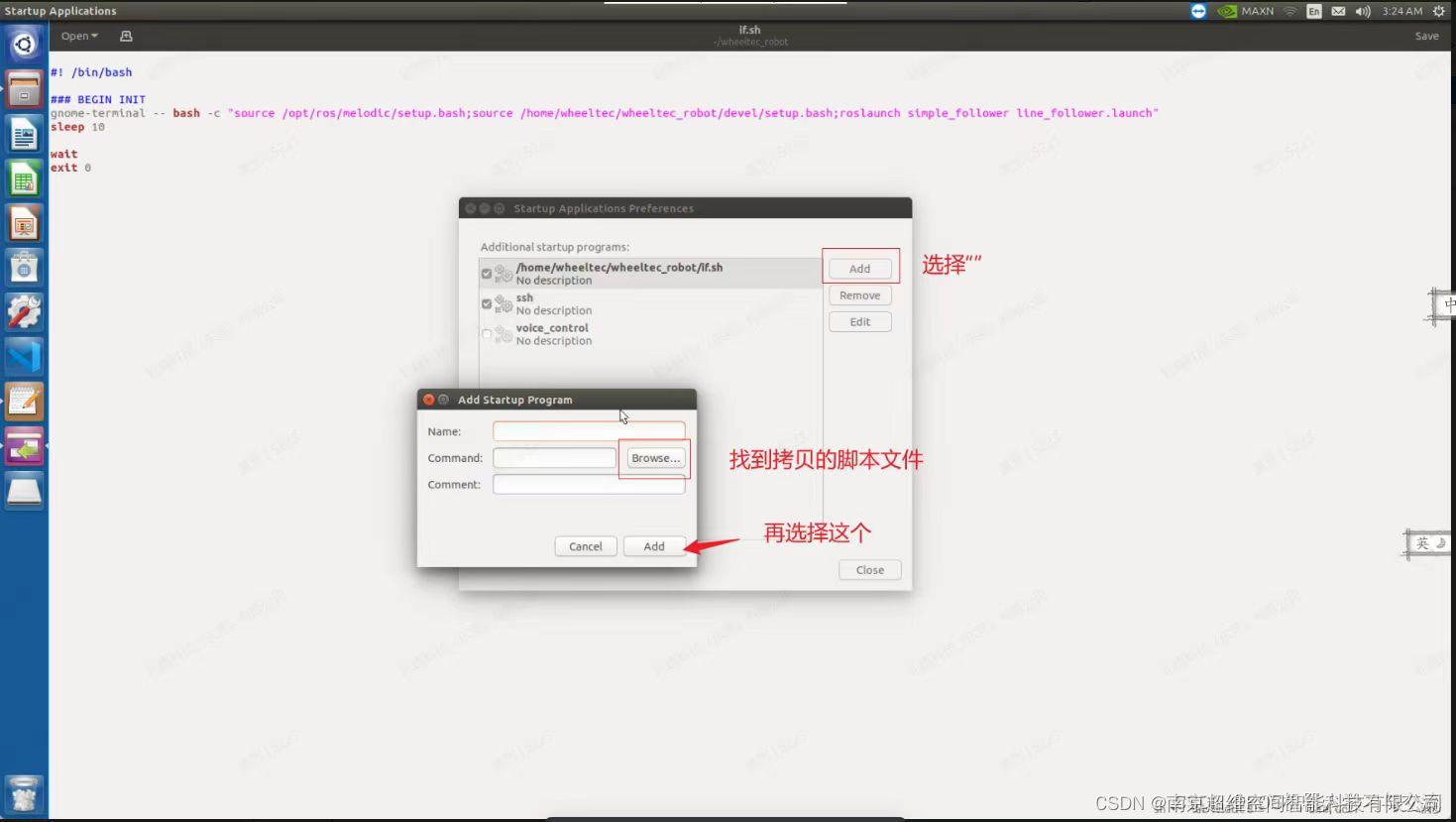
Jetson orin nano 8G设置ROS下launch文件开机自启动脚本文件
一、新建xxx.sh文件,将以下文件复制,需要根据自己的工作空间修改
###gmapping with abot###
gnome-terminal --window -e bash -c "source ~/cwkj_ws/devel/setup.bash;roslaunch robot_bringup px4.launch; exec bash" \
--tab -e bash -c &…
message_filters时间戳同步
在ROS中,用于接收消息并可以根据过滤器需要满足的条件在稍后输出这些消息。 就要用到 message_filters 库中的同步策略。ExactTime 和 ApproximateTime 是两种常见的同步策略。 来源Source: git https://github.com/ros/ros_comm.git ExactTime Policy (精确时间…
ubuntu20.04 创建ros环境、创建rospackage
roswiki教程:https://wiki.ros.org/cn/ROS/Tutorials
环境准备
安装ros环境
这里选择noetic版本的ros,安装步骤参考:https://zhuanlan.zhihu.com/p/662284005
创建工作空间
这里我在用户目录下创建catkin的工作目录catkin_ws ࿰…

ROS2从入门到精通0-4:ROS2核心架构与常用指令大全
目录 0 专栏介绍1 ROS2核心架构1.1 工作空间1.2 功能包 2 ROS2常用指令2.1 功能包相关2.2 节点运行相关2.3 话题相关2.4 参数相关2.4 录制包、播放包相关2.5 服务相关2.6 动作相关2.7 生命周期相关 0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布…
在ros中获取两个坐标系的外参关系
文章目录 1. 使用tf_echo命令行工具2. 在ROS节点中编程获取3. 使用RViz查看4. 使用tf2_ros库1. 使用tf_echo命令行工具
tf_echo可以在命令行中直接查看两个坐标系之间的变换信息。如果你想看frame1到frame2的变换,可以使用如下命令:
rosrun tf tf_echo frame1 frame2这会显…
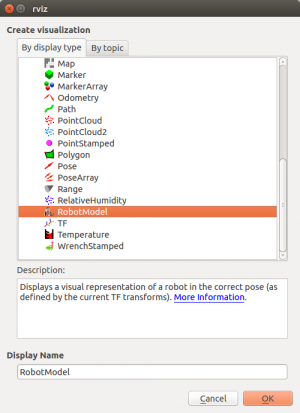
Sawyer 机器人 ROS SDK 配置
系列文章目录
目录
系列文章目录
前言
恢复出厂设置
内容
概述
要求
程序
将 Sawyer 升级到 Intera SDK 打印
内容
概述
先决条件
安装步骤
将机器人从 Intera MFG 切换到 SDK 模式
联网
内容
确认 Sawyer 在机器人上以 SDK 模式运行
基本
基本要求
网络…
从零开始的机械臂yolov5抓取gazebo仿真(导航贴)
本篇博客为《从零开始的机械臂yolov5抓取gazebo仿真》系列的导航贴
该导航帖将会不断更新
从零开始的机械臂yolov5抓取gazebo仿真视频链接:项目视频链接
一.教程部分
从零开始的机械臂yolov5抓取gazebo仿真系列目录如下 1.在SolidWorks中将机械臂模型导出机械臂…
ROS机器人入门第一课:ROS快速体验——python实现HelloWorld
文章目录 ROS机器人入门第一课:ROS快速体验——python实现HelloWorld一、HelloWorld实现简介(一)创建工作空间并初始化(二)进入 src 创建 ros 包并添加依赖 二、HelloWorld(Python版)(二)进入 r…
ROS2从入门到精通1-2:详解ROS2服务通信机制与自定义服务
目录 0 专栏介绍1 服务通信模型2 服务模型实现(C)3 服务模型实现(Python)4 自定义服务5 话题、服务通信的异同 0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。…
UR5 机器人 URDF 代码阅读
系列文章目录 文章目录 系列文章目录前言一、UR5 URDF 代码二、base_link三、shoulder_pan_joint四、shoulder_pan_trans五、ROS base_link 坐标系到 UR 机器人 Base 坐标系的转换六、与全零TCP(工具坐标系)重合的工具链接 前言 一、UR5 URDF 代码
<…
【ROS】—— ROS运行管理 ——元功能包与launch文件(八)
文章目录前言1. 元功能包1.1 应用场景1.2 概念1.3 实现2. ROS节点运行管理launch文件2.1 launch文件标签之launch2.2 launch文件标签之node2.3 launch文件标签之include2.4 launch文件标签之remap2.5 launch文件标签之param2.6 launch文件标签之rosparam2.7 launch文件标签之gr…
ROS笔记(4)——发布者Publisher与订阅者Subscribe的编程实现
发布者
以小海龟的话题消息为例,编程实现发布者通过/turtle1/cmd_vel 话题向 turtlesim节点发送消息,流程如图 步骤一 创建功能包(工作空间为~/catkin_ws/src)
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_topic roscpp rospy s…
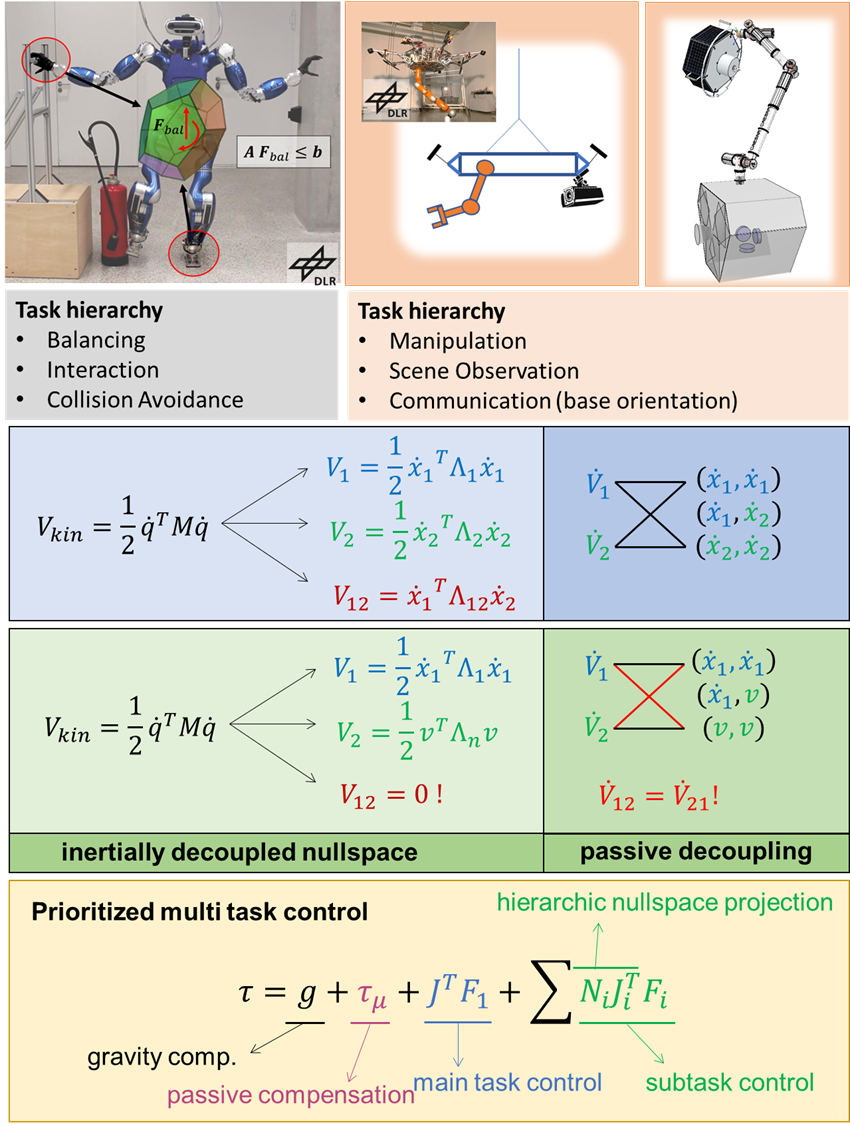
Humanoid Robotics Whole Body Control(WBC)全身控制
系列文章目录 文章目录 系列文章目录前言一、ROS —— 什么是全身控制?二、IEEE - RAS三、维也纳工业大学 —— 自动化与控制研究所(ACIN)四、IIt(意大利技术研究院) 前言
谷歌的几种解释 一、ROS —— 什么是全身控制…
![[yolo系列:yolov7添加可变形卷积Deformable Conv V2]](https://img-blog.csdnimg.cn/36dd310d10e246bc81eb27d042fd943e.png)
[yolo系列:yolov7添加可变形卷积Deformable Conv V2]
yolo系列文章目录 文章目录 yolo系列文章目录一、可变形卷积是什么?二、使用步骤1.在models/common.py文件添加2.然后再yolo.py里面添加DCNv23.修改yolov7的yaml 总结参考文章 一、可变形卷积是什么? 可变形卷积即DCN(缩写取自Deformable Con…
2.0 安装 ROS
目录 2.1 . 配置Ubuntu软件仓库
2.1.1 为什么配置Ubuntu软件仓库
2.1.2 如何配置Ubuntu的软件仓库
2.2设置sources.list
2.2.1 为什么要设置source.list
2.2.2 设置与更换source.list
2.3 设置密钥
2.4 安装
2.5 初始化 rosdep
2.6 设置环境
2.6.1 为什么设置
2.6.…