ios
jvm
堆
电商
链表
循环
安全测试
数据卷
jQuery
Android蓝牙使能
区别
代码混淆
创业项目
tee
读写分离
学生HTML网页作业作品
证件照
Eolink
天际线启发式
Typora优点
运动规划
2024/4/11 18:56:47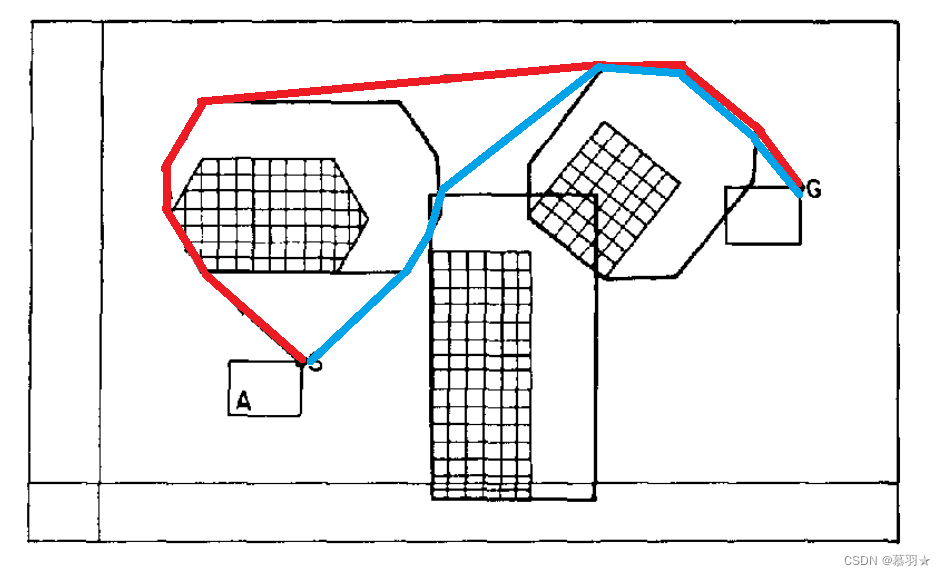
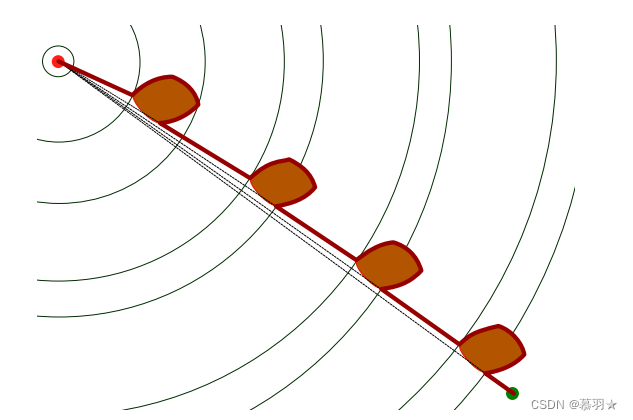
基于可视图法(VG)的路径规划算法简述
可视图法路径规划(VG) 可视图法由Lozano-Perez和Wesley于1979年在论文:《An Algorithm for Planning Collision-Free Paths among Polyhedral Obstacles.》中提出。 基于可视图法路径规划算法主要包括以下两个步骤:①可视图的构建…
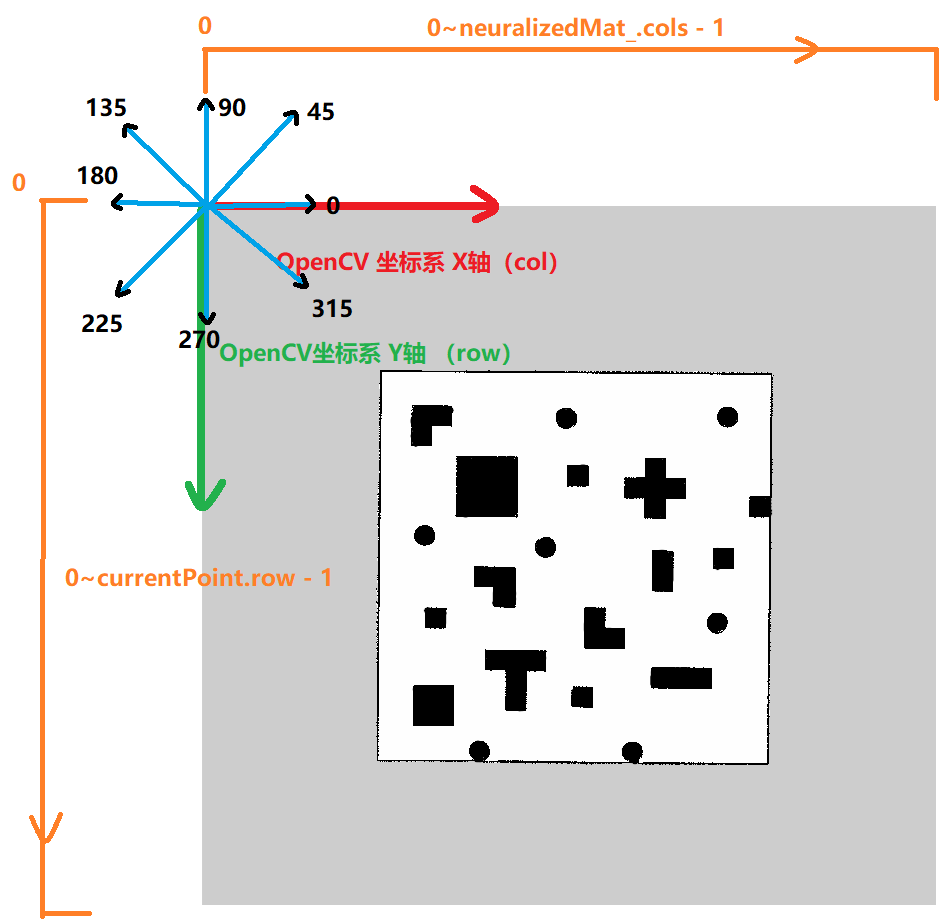
全覆盖路径规划开源项目Clean-robot-turtlebot3关键函数解析(下)
本系列文章主要介绍全覆盖路径规划开源项目Clean-robot-turtlebot3的相关内容,包含如下四篇文章,分别介绍了开源项目Clean-robot-turtlebot3流程的概括总结、ROS坐标系常用坐标及其变换、Clean-robot-turtlebot3关键函数解析等内容。 1、全覆盖路径规划开…

动力学约束下的运动规划算法——Kinodynamic RRT*算法
一、RRT * 算法回顾 为了更好的理解Kinodynamic RRT*算法,我们先来回顾一下RRT * 算法 RRT * 先通过Sample函数随机选取一个点Xrand,然后通过Near函数找到当前树上距离Xrand最近的一个点Xnear,再通过Steer函数,沿着从Xnear到Xra…
动力学约束下的运动规划算法——Hybrid A*算法(附程序实现及详细解释)
前言(推荐读一下) 本文主要介绍动力学约束下的运动规划算法中非常经典的Hybrid A*算法,大致分为三部分,第一部分是在传统A * 算法的基础上,对Hybrid A * 算法的原理、流程进行理论介绍。第二部分是详细分析 MotionPl…
移动机器人运动规划---基于图搜索的基础知识---配置空间
配置空间
机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为C-space
机器人配置:表示对机器人上面所以点的位置的描述机器人自由度:规划的时候用最少的坐标数量去表示机器人配置,例如无人机…

驱动运动学:Skid steer滑移转向和mecanum麦克纳姆(包括 ROS Twist)
文章目录 概要滑移转向/差速驱动基于圆弧的命令ROS 的线性和角速度命令 麦克纳姆轮数学正向运动学逆运动学 参考 概要
我经常需要滑移转向车辆的基本运动方程。我最近也一直在研究麦克纳姆轮车辆。滑移转向方程相当简单且易于找到,但我会将其包含在不同的版本中&am…
【AI视野·今日Robot 机器人论文速览 第五十九期】Fri, 20 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 20 Oct 2023 Totally 29 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
CCIL: Continuity-based Data Augmentation for Corrective Imitation Learning Authors Liyiming Ke, Yunchu Zhang, Abhay D…
移动机器人运动规划 --- 基于图搜索的Dijkstra算法
移动机器人运动规划 --- 基于图搜索的Dijkstra算法 Dijkstra 算法Dijkstra 算法 伪代码流程Dijkstra 算法步骤示例Dijkstra算法的优劣分析 Dijkstra 算法
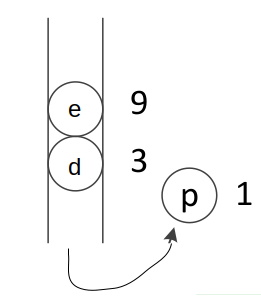
Dijkstra 算法与BFS算法的区别就是 : 从容器中弹出接下来要访问的节点的规则不同
BFS 弹出: 层级最浅的原则,…

机器人中的数值优化(十五)——PHR增广拉格朗日乘子法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…
移动机器人运动规划---基于图搜索的基础知识---广度优先遍历与深度优先遍历
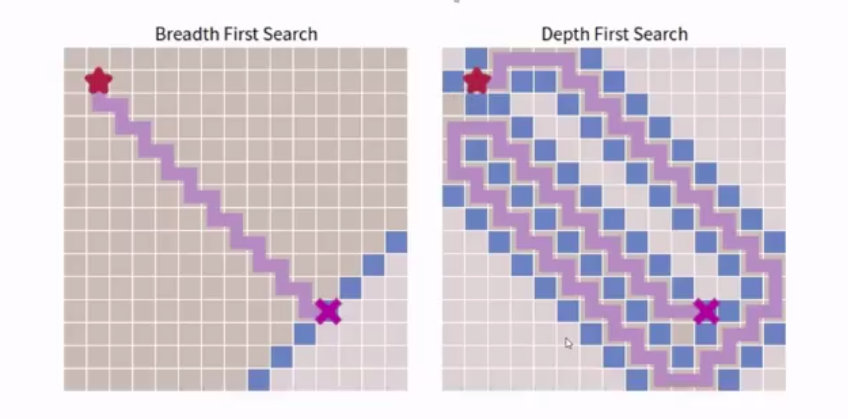
移动机器人运动规划---基于图搜索的基础知识---广度优先遍历与深度优先遍历 广度优先搜索(BFS)深度优先搜索(DFS)BFS vs DFS 图搜索优化的方向就是: 按照什么规则去访问节点,按照什么规则弹出节点ÿ…

reeds_sheep运动规划算法Python源码分析
本文用于记录Python版本zhm-real / PathPlanning运动规划库中reeds_sheep算法的源码分析 关于reeds sheep算法的原理介绍前文已经介绍过了,链接如下所示: 《Reeds-Shepp曲线学习笔记及相关思考》 《Reeds-Shepp曲线基础运动公式推导过程》 正文ÿ…
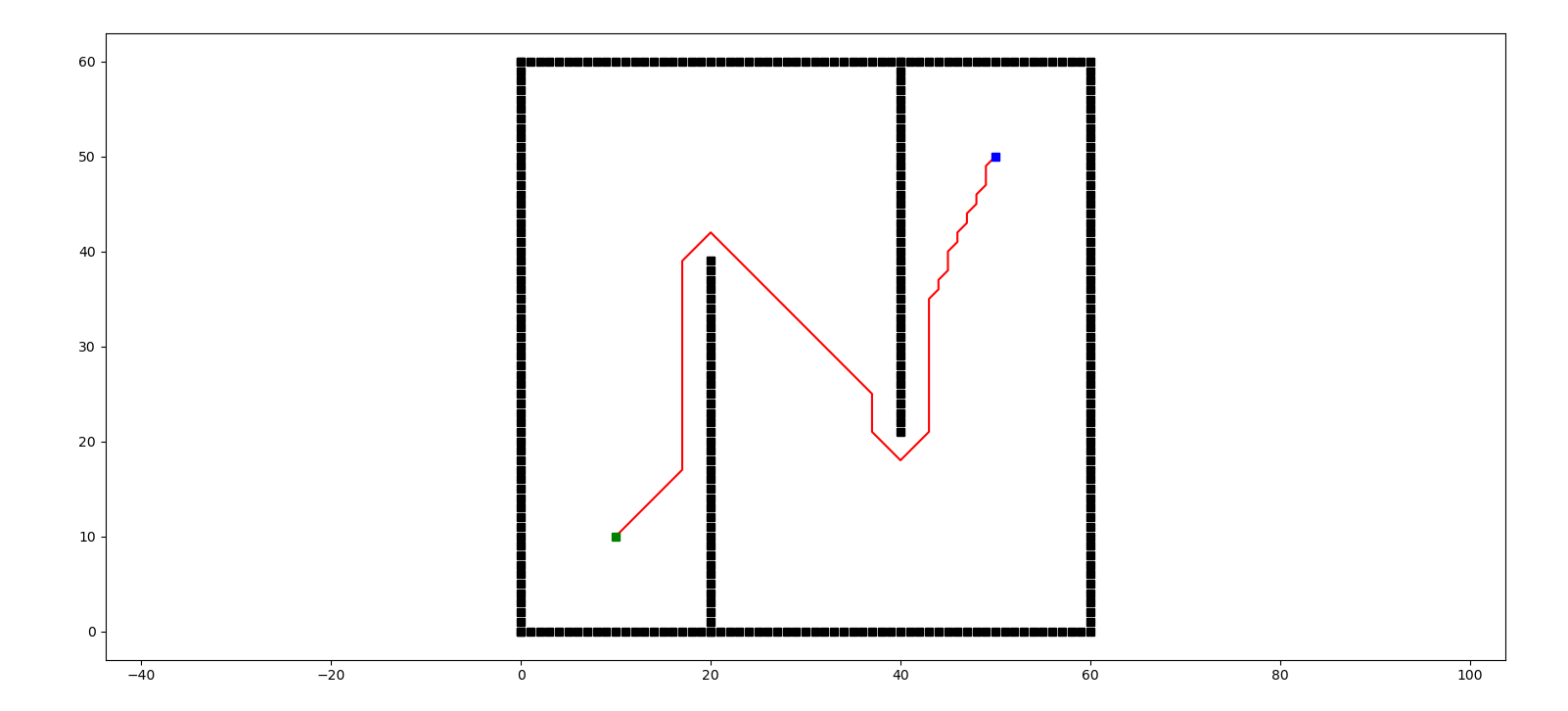
zhm_real/MotionPlanning运动规划库中A*算法源码详细解读
本文主要对zhm_real/MotionPlanning运动规划库中A*算法源码进行详细解读,即对astar.py文件中的内容进行详细的解读,另外本文是 Hybrid A * 算法源码解读的前置文章,为后续解读Hybrid A * 算法源码做铺垫。 astar.py文件中的源码如下ÿ…

机器人中的数值优化(十)——线性共轭梯度法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…

base_lcoal_planner的LocalPlannerUtil类中getLocalPlan函数详解
本文主要介绍base_lcoal_planner功能包中LocalPlannerUtil类的getLocalPlan函数,以及其调用的transformGlobalPlan函数、prunePlan函数的相关内容 一、getLocalPlan函数 getLocalPlan函数的源码如下:
bool LocalPlannerUtil::getLocalPlan(const geomet…

机器人中的数值优化(十三)——QP二次规划
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…

ROS机器人未知环境自主探索功能包explore_lite最全源码详细解析(一)
本系列文章主要针对ROS机器人常使用的未知环境自主探索功能包explore_lite展开全源码的详细解析,并进行概括总结。 本系列文章共包含六篇文章,前五篇文章主要介绍explore_lite功能包中 explore.cpp、costmap_tools.h、frontier_search.cpp、costmap_clie…

机器人中的数值优化(十一)——高斯牛顿法、LMF方法、Dogleg方法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…

机器人中的数值优化(二十)——函数的光滑化技巧
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…

机器人中的数值优化(十二)——带约束优化问题简介、LP线性规划
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…

机器人中的数值优化(九)——拟牛顿方法(下)、BB方法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…

机器人中的数值优化(八)——拟牛顿方法(上)
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…
Bug系列路径规划算法原理介绍(四)——I-BUG 算法
本系列文章主要对Bug类路径规划算法的原理进行介绍,在本系列的第一篇文章中按照时间顺序梳理了自1986年至2018年Bug类路径规划算法的发展,整理了13种BUG系列中的典型算法,从本系列的第二篇文章开始依次详细介绍了其中具有代表性的BUG1、BUG2、…
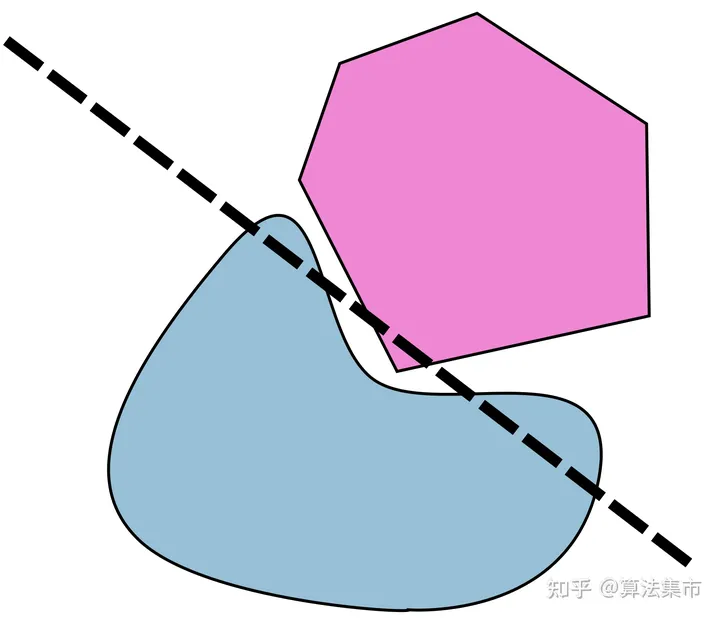
运动规划_碰撞检测算法之分离轴定理
运动规划:碰撞检测算法之分离轴定理 附赠自动驾驶全套学习资料和量产经验:链接
如上文所述,基于包围形的方法是一种粗略的碰撞检测方法,基于外接圆形的方法运算速度很快,但精度很差;基于轴对齐包围矩形(AA…

无人驾驶汽车运动规划方法研究综述 - 阅读笔记
本文旨在对自己的研究方向做一些学习记录,方便日后回顾,详细论文细节见:无人驾驶汽车运动规划方法研究综述
1 摘要
文章从环境建模和路径搜索两个方面对现有的路径规划算法进行阐述(算法原理、应用现状、优缺点)。
…
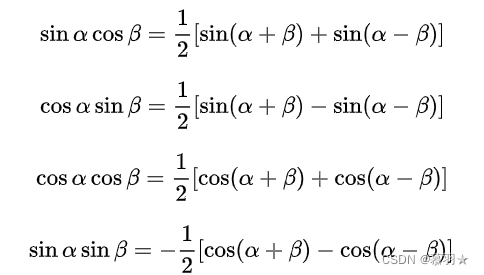
Reeds-Shepp曲线基础运动公式推导过程
本文是对之前文章“Reeds-Shepp曲线学习笔记及相关思考【点击可跳转】”的补充,因小伙伴的提问,本文补充介绍上述文章第三部分中基础运动公式的推导过程。 本文以上面的第一个公式为例进行介绍,即Reeds-Shepp曲线基础运动中的向前左转运动&am…